 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAQPDCITY Dataset: Picture-Based PM Monitoring in the Urban Area of Big Cities
Apr 06, 2020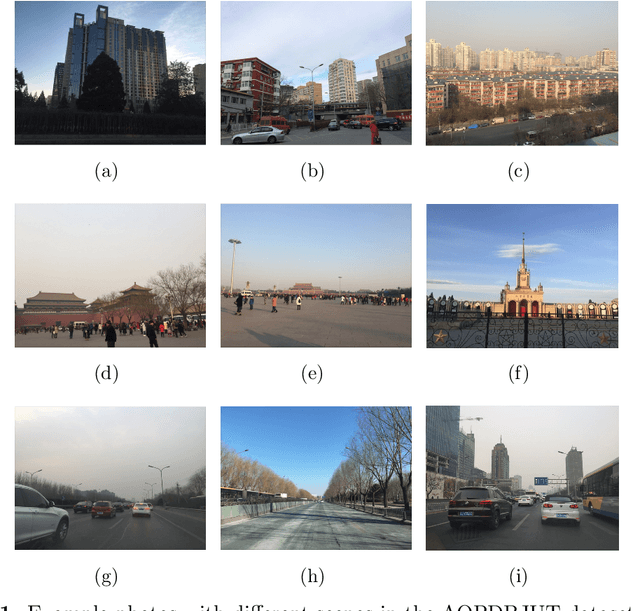
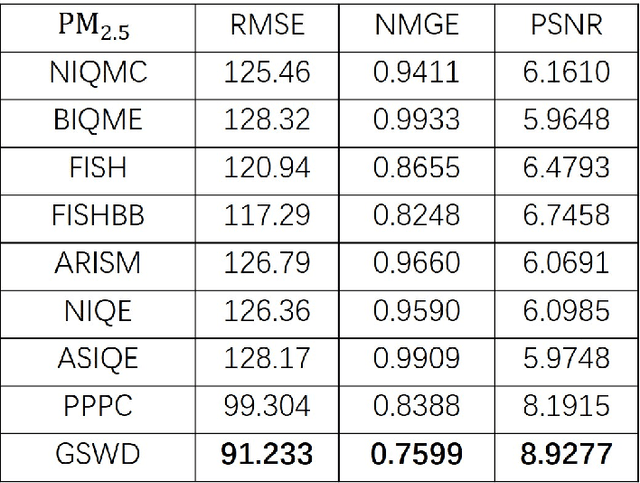
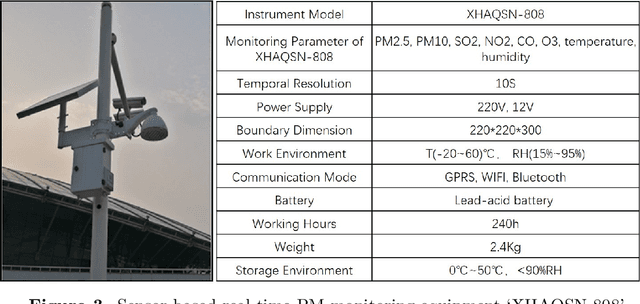
Since Particulate Matters (PMs) are closely related to people's living and health, it has become one of the most important indicator of air quality monitoring around the world. But the existing sensor-based methods for PM monitoring have remarkable disadvantages, such as low-density monitoring stations and high-requirement monitoring conditions. It is highly desired to devise a method that can obtain the PM concentration at any location for the following air quality control in time. The prior works indicate that the PM concentration can be monitored by using ubiquitous photos. To further investigate such issue, we gathered 1,500 photos in big cities to establish a new AQPDCITY dataset. Experiments conducted to check nine state-of-the-art methods on this dataset show that the performance of those above methods perform poorly in the AQPDCITY dataset.
AQPDBJUT Dataset: Picture-Based PM Monitoring in the Campus of BJUT
Mar 21, 2020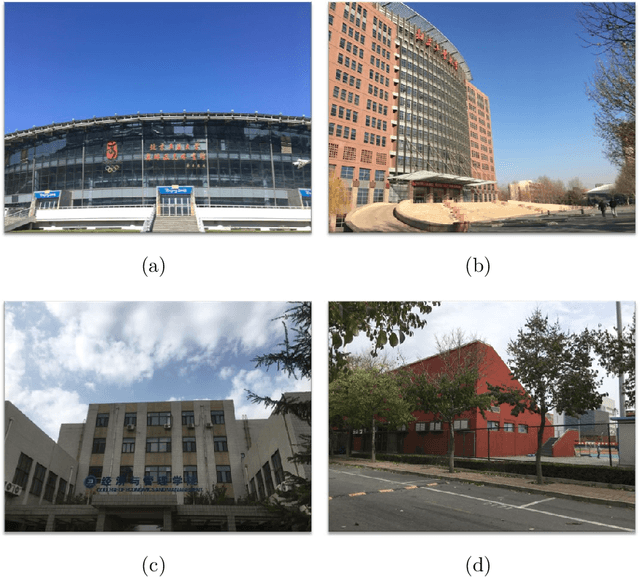

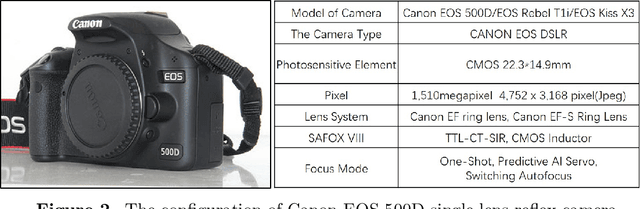
Ensuring the students in good physical levels is imperative for their future health. In recent years, the continually growing concentration of Particulate Matter (PM) has done increasingly serious harm to student health. Hence, it is highly required to prevent and control PM concentrations in the campus. As the source of PM prevention and control, developing a good model for PM monitoring is extremely urgent and has posed a big challenge. It has been found in prior works that photobased methods are available for PM monitoring. To verify the effectiveness of existing PM monitoring methods in the campus, we establish a new dataset which includes 1,500 photos collected in the Beijing University of Technology. Experiments show that stated-of-the-art methods are far from ideal for PM monitoring in the campus.
Augmented Reality on the Large Scene Based on a Markerless Registration Framework
Mar 07, 2020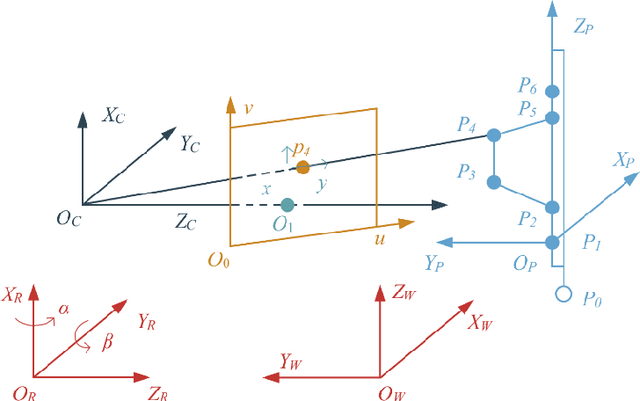

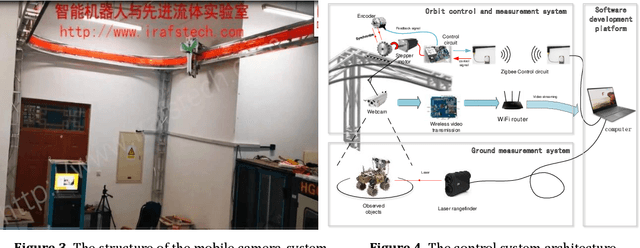
In this paper, a mobile camera positioning method based on forward and inverse kinematics of robot is proposed, which can realize far point positioning of imaging position and attitude tracking in large scene enhancement. Orbit precision motion through the framework overhead cameras and combining with the ground system of sensor array object such as mobile robot platform of various sensors, realize the good 3 d image registration, solve any artifacts that is mobile robot in the large space position initialization problem, effectively implement the large space no marks augmented reality, human-computer interaction, and information summary. Finally, the feasibility and effectiveness of the method are verified by experiments.