 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeType-enhanced Ensemble Triple Representation via Triple-aware Attention for Cross-lingual Entity Alignment
May 02, 2023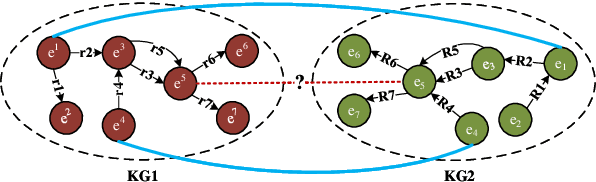
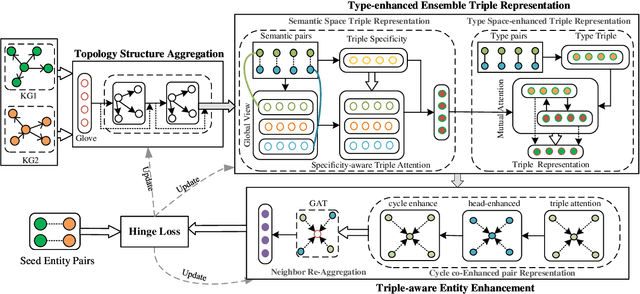
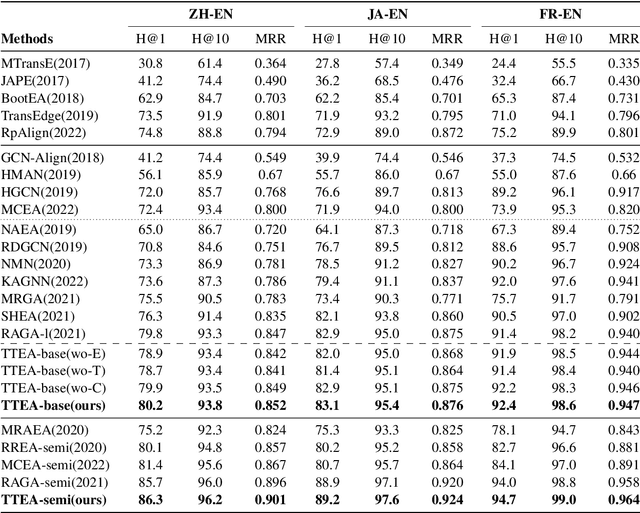
Entity alignment(EA) is a crucial task for integrating cross-lingual and cross-domain knowledge graphs(KGs), which aims to discover entities referring to the same real-world object from different KGs. Most existing methods generate aligning entity representation by mining the relevance of triple elements via embedding-based methods, paying little attention to triple indivisibility and entity role diversity. In this paper, a novel framework named TTEA -- Type-enhanced Ensemble Triple Representation via Triple-aware Attention for Cross-lingual Entity Alignment is proposed to overcome the above issues considering ensemble triple specificity and entity role features. Specifically, the ensemble triple representation is derived by regarding relation as information carrier between semantic space and type space, and hence the noise influence during spatial transformation and information propagation can be smoothly controlled via specificity-aware triple attention. Moreover, our framework uses triple-ware entity enhancement to model the role diversity of triple elements. Extensive experiments on three real-world cross-lingual datasets demonstrate that our framework outperforms state-of-the-art methods.
Biomimetic Evaluation of an Underwater Soft Hand Through Deep Learning-based 3D Pose Reconstruction
Mar 16, 2022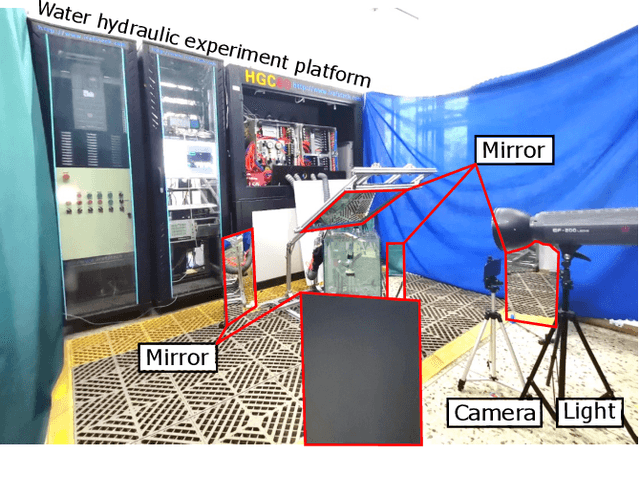
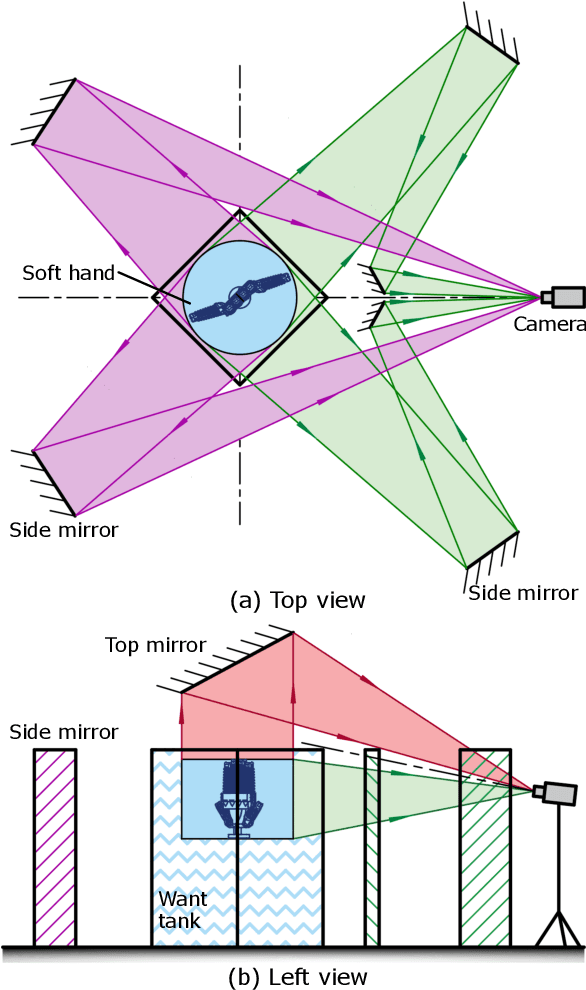
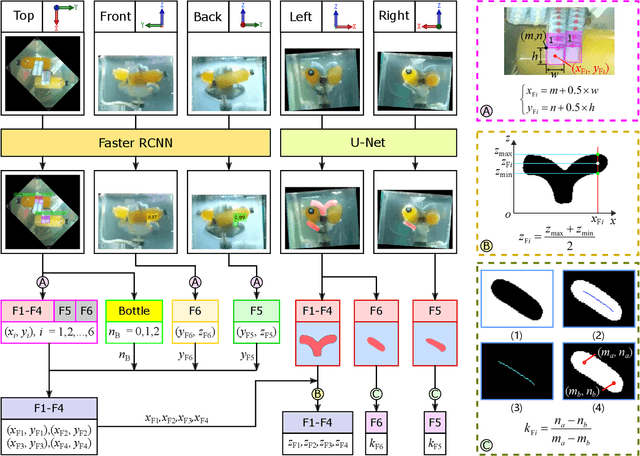

Soft robotic hand shows considerable promise for various grasping applications. However, the sensing and reconstruction of the robot pose will cause limitation during the design and fabrication. In this work, we present a novel 3D pose reconstruction approach to analyze the grasping motion of a bidirectional soft robotic hand using experiment videos. The images from top, front, back, left, right view were collected using an one-camera-multiple-mirror imaging device. The coordinate and orientation information of soft fingers are detected based on deep learning methods. Faster RCNN model is used to detect the position of fingertips, while U-Net model is applied to calculate the side boundary of the fingers. Based on the kinematics, the corresponding coordinate and orientation databases are established. The 3D pose reconstructed result presents a satisfactory performance and good accuracy. Using efficacy coefficient method, the finger contribution of the bending angle and distance between fingers of soft robot hand is analyzed by compared with that of human hand. The results show that the soft robot hand perform a human-like motion in both single-direction and bidirectional grasping.
Underwater Soft Robotic Hand with Multi-Source Coupling Bio-Inspired Soft Palm and Six Fingers Driven by Water Hydraulic
Jun 13, 2021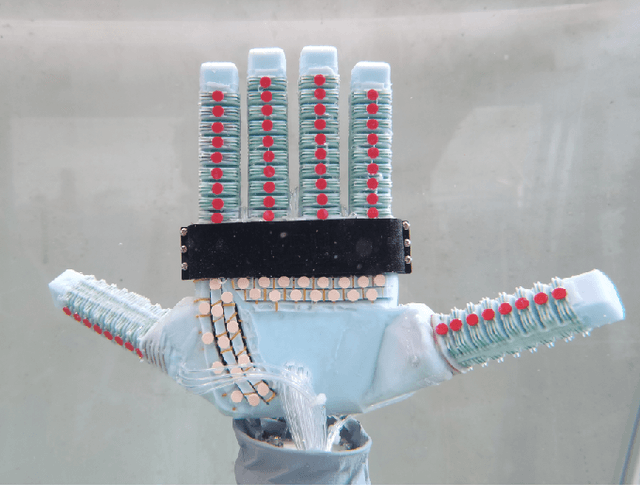
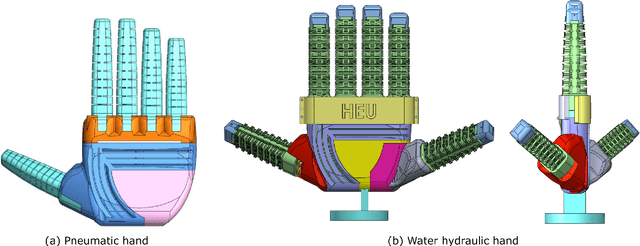
A new fluid-driven soft robot hand in this study uses the idea of the bionics and has the anthropomorphic form, which is oriented to the flexible grasp function. The soft robot hand is composed of a new kind of multi-freedom soft finger and soft palm, which realizes the characteristic grasping function of forehand and backhand. Combined with the fine fluid control system, the soft hand can realize flexible grasping under high pressure, so as to realize flexible grasping operation for different types of target objects in the underwater environment. The soft robot hand was controlled based on water hydraulic platform, Finally, the soft robot hand and the fine fluid control system were connected to form the underwater soft robot hand experiment platform.
A Novel Design of Soft Robotic Hand with a Human-inspired Soft Palm for Dexterous Grasping
Sep 02, 2020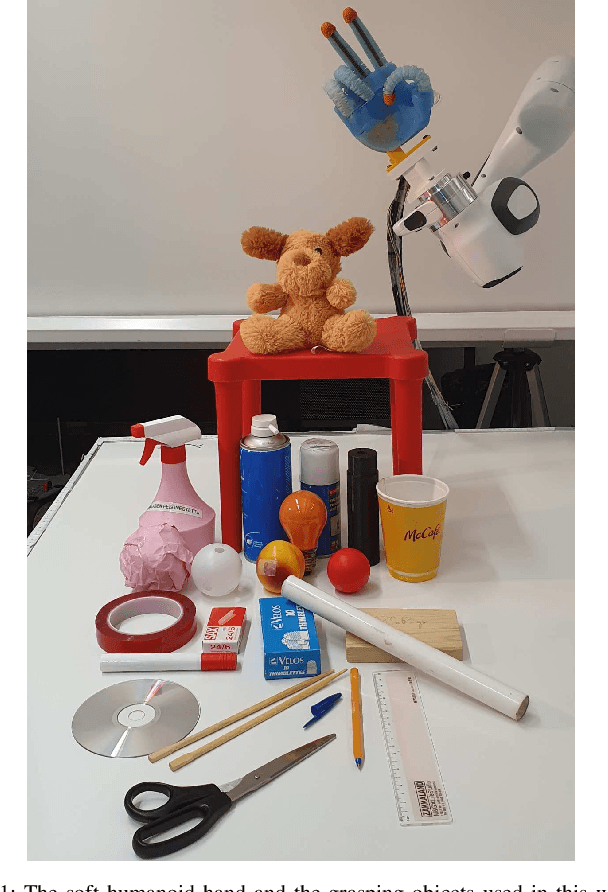
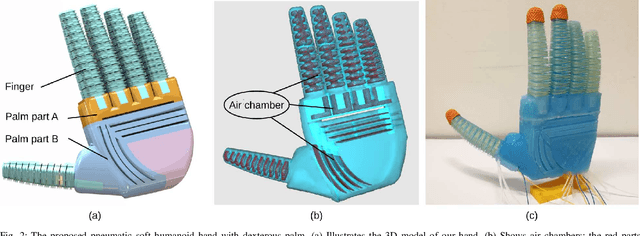
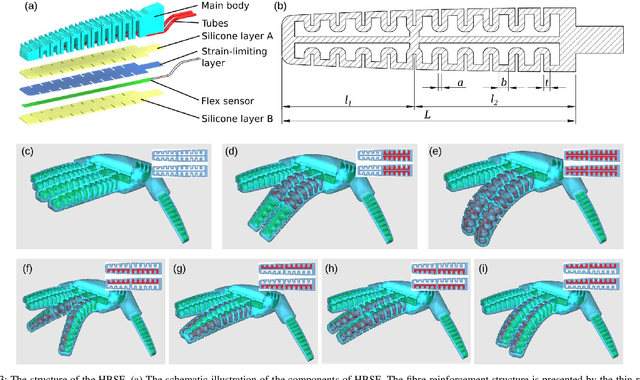
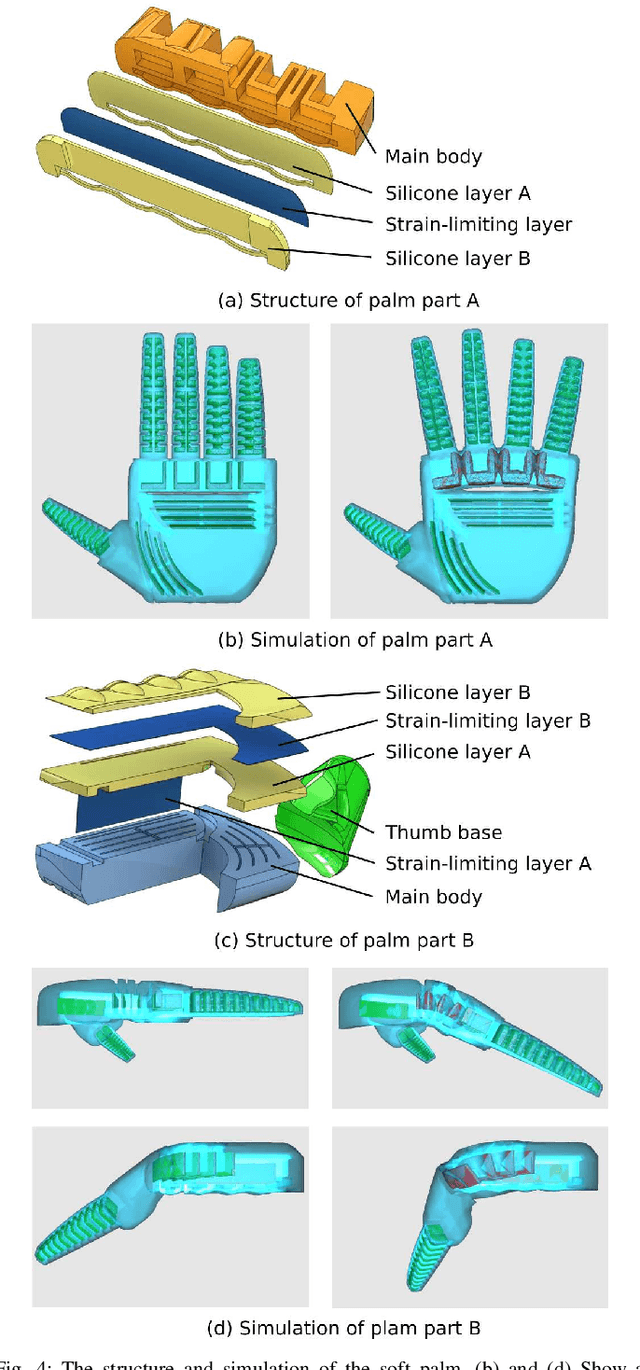
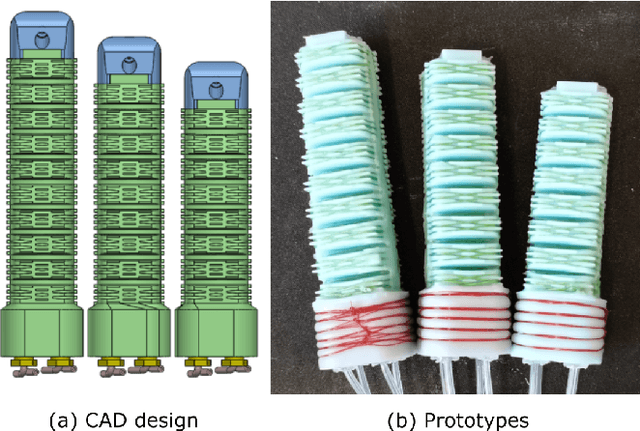
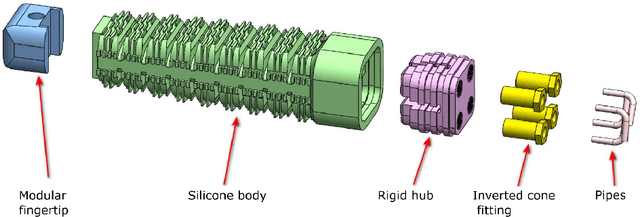
Soft robotic hands and grippers are increasingly attracting attention as a robotic end-effector. Compared with rigid counterparts, they are safer for human-robot and environment-robot interactions, easier to control, lower cost and weight, and more compliant. Current soft robotic hands have mostly focused on the soft fingers and bending actuators. However, the palm is also essential part for grasping. In this work, we propose a novel design of soft humanoid hand with pneumatic soft fingers and soft palm. The hand is inexpensive to fabricate. The configuration of the soft palm is based on modular design which can be easily applied into actuating all kinds of soft fingers before. The splaying of the fingers, bending of the whole palm, abduction and adduction of the thumb are implemented by the soft palm. Moreover, we present a new design of soft finger, called hybrid bending soft finger (HBSF). It can both bend in the grasping axis and deflect in the side-to-side axis as human-like motion. The functions of the HBSF and soft palm were simulated by SOFA framework. And their performance was tested in experiments. The 6 fingers with 1 to 11 segments were tested and analyzed. The versatility of the soft hand is evaluated and testified by the grasping experiments in real scenario according to Feix taxonomy. And the results present the diversity of grasps and show promise for grasping a variety of objects with different shapes and weights.