 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAstraea: A State-Aware Scheduling Engine for LLM-Powered Agents
Dec 16, 2025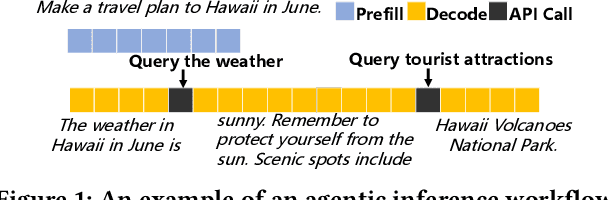
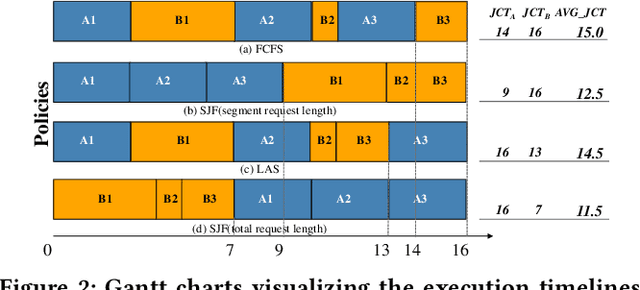
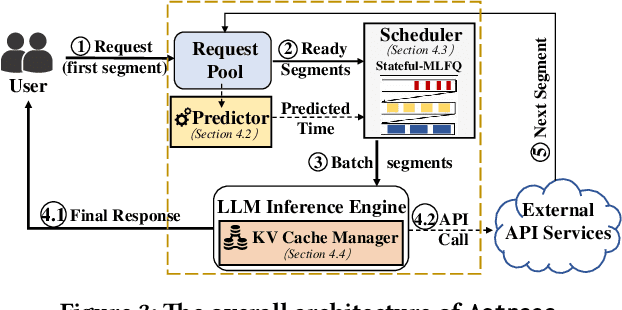
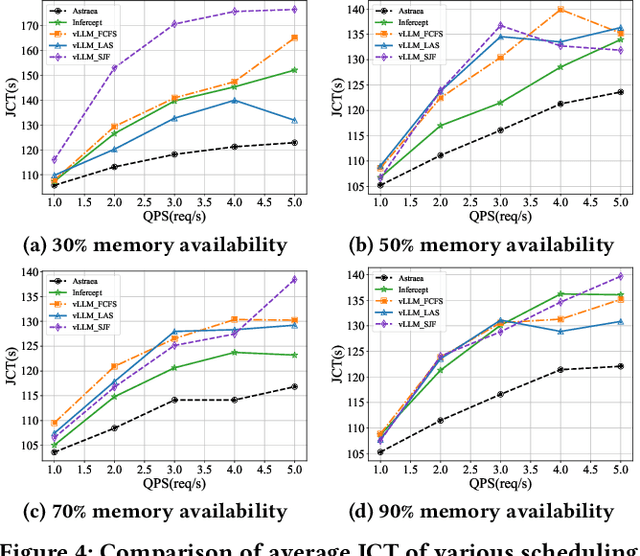
Large Language Models (LLMs) are increasingly being deployed as intelligent agents. Their multi-stage workflows, which alternate between local computation and calls to external network services like Web APIs, introduce a mismatch in their execution pattern and the scheduling granularity of existing inference systems such as vLLM. Existing systems typically focus on per-segment optimization which prevents them from minimizing the end-to-end latency of the complete agentic workflow, i.e., the global Job Completion Time (JCT) over the entire request lifecycle. To address this limitation, we propose Astraea, a service engine designed to shift the optimization from local segments to the global request lifecycle. Astraea employs a state-aware, hierarchical scheduling algorithm that integrates a request's historical state with future predictions. It dynamically classifies requests by their I/O and compute intensive nature and uses an enhanced HRRN policy to balance efficiency and fairness. Astraea also implements an adaptive KV cache manager that intelligently handles the agent state during I/O waits based on the system memory pressure. Extensive experiments show that Astraea reduces average JCT by up to 25.5\% compared to baseline methods. Moreover, our approach demonstrates strong robustness and stability under high load across various model scales.
Real-Time Neural-Enhancement for Online Cloud Gaming
Jan 12, 2025



Online Cloud gaming demands real-time, high-quality video transmission across variable wide-area networks (WANs). Neural-enhanced video transmission algorithms employing super-resolution (SR) for video quality enhancement have effectively challenged WAN environments. However, these SR-based methods require intensive fine-tuning for the whole video, making it infeasible in diverse online cloud gaming. To address this, we introduce River, a cloud gaming delivery framework designed based on the observation that video segment features in cloud gaming are typically repetitive and redundant. This permits a significant opportunity to reuse fine-tuned SR models, reducing the fine-tuning latency of minutes to query latency of milliseconds. To enable the idea, we design a practical system that addresses several challenges, such as model organization, online model scheduler, and transfer strategy. River first builds a content-aware encoder that fine-tunes SR models for diverse video segments and stores them in a lookup table. When delivering cloud gaming video streams online, River checks the video features and retrieves the most relevant SR models to enhance the frame quality. Meanwhile, if no existing SR model performs well enough for some video segments, River will further fine-tune new models and update the lookup table. Finally, to avoid the overhead of streaming model weight to the clients, River designs a prefetching strategy that predicts the models with the highest possibility of being retrieved. Our evaluation based on real video game streaming demonstrates River can reduce redundant training overhead by 44% and improve the Peak-Signal-to-Noise-Ratio by 1.81dB compared to the SOTA solutions. Practical deployment shows River meets real-time requirements, achieving approximately 720p 20fps on mobile devices.
An Experimental Study of Passive UAV Tracking with Digital Arrays and Cellular Downlink Signals
Dec 30, 2024Given the prospects of the low-altitude economy (LAE) and the popularity of unmanned aerial vehicles (UAVs), there are increasing demands on monitoring flying objects at low altitude in wide urban areas. In this work, the widely deployed long-term evolution (LTE) base station (BS) is exploited to illuminate UAVs in bistatic trajectory tracking. Specifically, a passive sensing receiver with two digital antenna arrays is proposed and developed to capture both the line-of-sight (LoS) signal and the scattered signal off a target UAV. From their cross ambiguity function, the bistatic range, Doppler shift and angle-of-arrival (AoA) of the target UAV can be detected in a sequence of time slots. In order to address missed detections and false alarms of passive sensing, a multi-target tracking framework is adopted to track the trajectory of the target UAV. It is demonstrated by experiments that the proposed UAV tracking system can achieve a meter-level accuracy.
Online Video Streaming Super-Resolution with Adaptive Look-Up Table Fusion
Mar 01, 2023This paper focuses on Super-resolution for online video streaming data. Applying existing super-resolution methods to video streaming data is non-trivial for two reasons. First, to support application with constant interactions, video streaming has a high requirement for latency that most existing methods are less applicable, especially on low-end devices. Second, existing video streaming protocols (e.g., WebRTC) dynamically adapt the video quality to the network condition, thus video streaming in the wild varies greatly under different network bandwidths, which leads to diverse and dynamic degradations. To tackle the above two challenges, we proposed a novel video super-resolution method for online video streaming. First, we incorporate Look-Up Table (LUT) to lightweight convolution modules to achieve real-time latency. Second, for variant degradations, we propose a pixel-level LUT fusion strategy, where a set of LUT bases are built upon state-of-the-art SR networks pre-trained on different degraded data, and those LUT bases are combined with extracted weights from lightweight convolution modules to adaptively handle dynamic degradations. Extensive experiments are conducted on a newly proposed online video streaming dataset named LDV-WebRTC. All the results show that our method significantly outperforms existing LUT-based methods and offers competitive SR performance with faster speed compared to efficient CNN-based methods. Accelerated with our parallel LUT inference, our proposed method can even support online 720P video SR around 100 FPS.
Enhance the performance of navigation: A two-stage machine learning approach
Apr 02, 2020
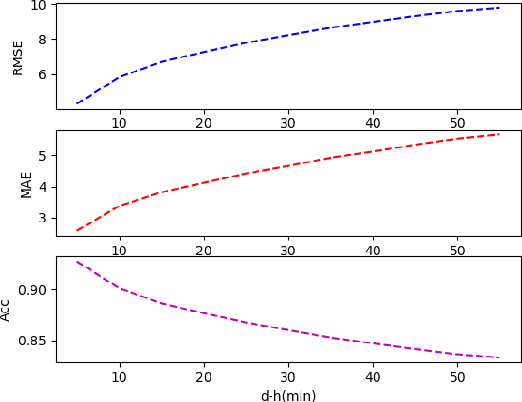
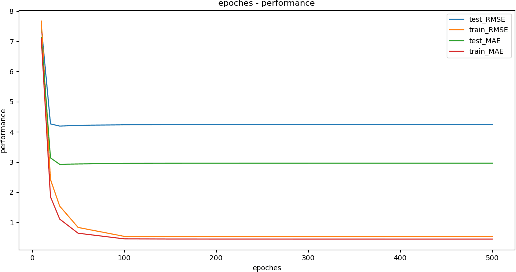
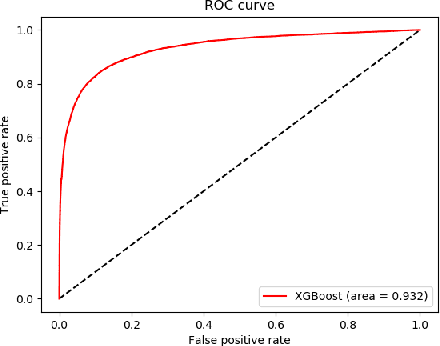
Real time traffic navigation is an important capability in smart transportation technologies, which has been extensively studied these years. Due to the vast development of edge devices, collecting real time traffic data is no longer a problem. However, real traffic navigation is still considered to be a particularly challenging problem because of the time-varying patterns of the traffic flow and unpredictable accidents/congestion. To give accurate and reliable navigation results, predicting the future traffic flow(speed,congestion,volume,etc) in a fast and accurate way is of great importance. In this paper, we adopt the ideas of ensemble learning and develop a two-stage machine learning model to give accurate navigation results. We model the traffic flow as a time series and apply XGBoost algorithm to get accurate predictions on future traffic conditions(1st stage). We then apply the Top K Dijkstra algorithm to find a set of shortest paths from the give start point to the destination as the candidates of the output optimal path. With the prediction results in the 1st stage, we find one optimal path from the candidates as the output of the navigation algorithm. We show that our navigation algorithm can be greatly improved via EOPF(Enhanced Optimal Path Finding), which is based on neural network(2nd stage). We show that our method can be over 7% better than the method without EOPF in many situations, which indicates the effectiveness of our model.