 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhance the performance of navigation: A two-stage machine learning approach
Apr 02, 2020
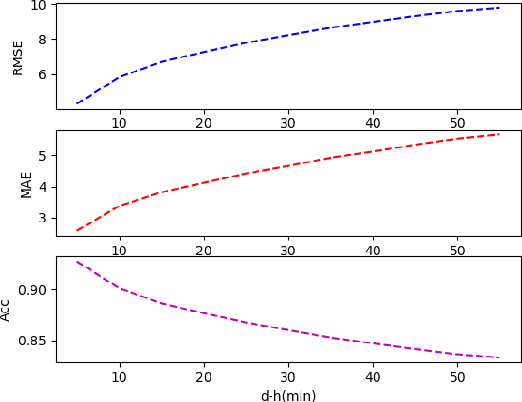
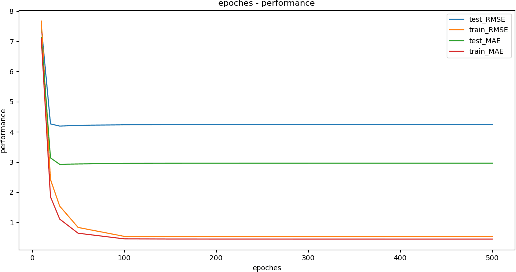
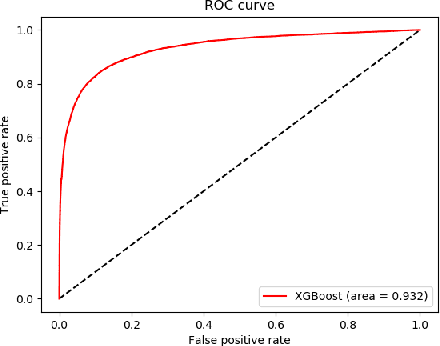
Real time traffic navigation is an important capability in smart transportation technologies, which has been extensively studied these years. Due to the vast development of edge devices, collecting real time traffic data is no longer a problem. However, real traffic navigation is still considered to be a particularly challenging problem because of the time-varying patterns of the traffic flow and unpredictable accidents/congestion. To give accurate and reliable navigation results, predicting the future traffic flow(speed,congestion,volume,etc) in a fast and accurate way is of great importance. In this paper, we adopt the ideas of ensemble learning and develop a two-stage machine learning model to give accurate navigation results. We model the traffic flow as a time series and apply XGBoost algorithm to get accurate predictions on future traffic conditions(1st stage). We then apply the Top K Dijkstra algorithm to find a set of shortest paths from the give start point to the destination as the candidates of the output optimal path. With the prediction results in the 1st stage, we find one optimal path from the candidates as the output of the navigation algorithm. We show that our navigation algorithm can be greatly improved via EOPF(Enhanced Optimal Path Finding), which is based on neural network(2nd stage). We show that our method can be over 7% better than the method without EOPF in many situations, which indicates the effectiveness of our model.