 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFocusing Robot Open-Ended Reinforcement Learning Through Users' Purposes
Mar 16, 2025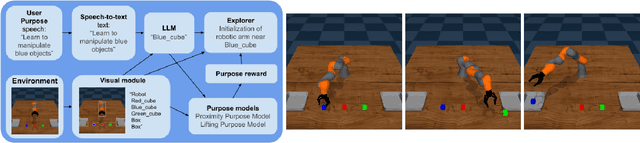
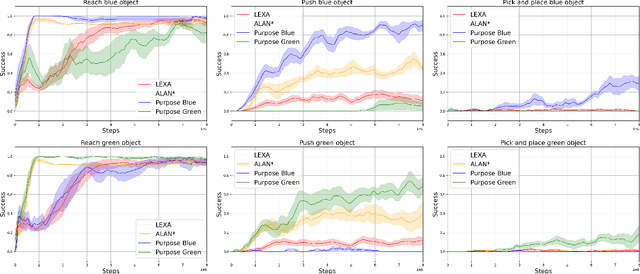
Open-Ended Learning (OEL) autonomous robots can acquire new skills and knowledge through direct interaction with their environment, relying on mechanisms such as intrinsic motivations and self-generated goals to guide learning processes. OEL robots are highly relevant for applications as they can autonomously leverage acquired knowledge to perform tasks beneficial to human users in unstructured environments, addressing challenges unforeseen at design time. However, OEL robots face a significant limitation: their openness may lead them to waste time learning information that is irrelevant to tasks desired by specific users. Here, we propose a solution called `Purpose-Directed Open-Ended Learning' (POEL), based on the novel concept of `purpose' introduced in previous work. A purpose specifies what users want the robot to achieve. The key insight of this work is that purpose can focus OEL on learning self-generated classes of tasks that, while unknown during autonomous learning (as typical in OEL), involve objects relevant to the purpose. This concept is operationalised in a novel robot architecture capable of receiving a human purpose through speech-to-text, analysing the scene to identify objects, and using a Large Language Model to reason about which objects are purpose-relevant. These objects are then used to bias OEL exploration towards their spatial proximity and to self-generate rewards that favour interactions with them. The solution is tested in a simulated scenario where a camera-arm-gripper robot interacts freely with purpose-related and distractor objects. For the first time, the results demonstrate the potential advantages of purpose-focused OEL over state-of-the-art OEL methods, enabling robots to handle unstructured environments while steering their learning toward knowledge acquisition relevant to users.
Purpose for Open-Ended Learning Robots: A Computational Taxonomy, Definition, and Operationalisation
Mar 04, 2024Autonomous open-ended learning (OEL) robots are able to cumulatively acquire new skills and knowledge through direct interaction with the environment, for example relying on the guidance of intrinsic motivations and self-generated goals. OEL robots have a high relevance for applications as they can use the autonomously acquired knowledge to accomplish tasks relevant for their human users. OEL robots, however, encounter an important limitation: this may lead to the acquisition of knowledge that is not so much relevant to accomplish the users' tasks. This work analyses a possible solution to this problem that pivots on the novel concept of `purpose'. Purposes indicate what the designers and/or users want from the robot. The robot should use internal representations of purposes, called here `desires', to focus its open-ended exploration towards the acquisition of knowledge relevant to accomplish them. This work contributes to develop a computational framework on purpose in two ways. First, it formalises a framework on purpose based on a three-level motivational hierarchy involving: (a) the purposes; (b) the desires, which are domain independent; (c) specific domain dependent state-goals. Second, the work highlights key challenges highlighted by the framework such as: the `purpose-desire alignment problem', the `purpose-goal grounding problem', and the `arbitration between desires'. Overall, the approach enables OEL robots to learn in an autonomous way but also to focus on acquiring goals and skills that meet the purposes of the designers and users.
A Definition of Open-Ended Learning Problems for Goal-Conditioned Agents
Nov 02, 2023A lot of recent machine learning research papers have "Open-ended learning" in their title. But very few of them attempt to define what they mean when using the term. Even worse, when looking more closely there seems to be no consensus on what distinguishes open-ended learning from related concepts such as continual learning, lifelong learning or autotelic learning. In this paper, we contribute to fixing this situation. After illustrating the genealogy of the concept and more recent perspectives about what it truly means, we outline that open-ended learning is generally conceived as a composite notion encompassing a set of diverse properties. In contrast with these previous approaches, we propose to isolate a key elementary property of open-ended processes, which is to always produce novel elements from time to time over an infinite horizon. From there, we build the notion of open-ended learning problems and focus in particular on the subset of open-ended goal-conditioned reinforcement learning problems, as this framework facilitates the definition of learning a growing repertoire of skills. Finally, we highlight the work that remains to be performed to fill the gap between our elementary definition and the more involved notions of open-ended learning that developmental AI researchers may have in mind.
A method for the ethical analysis of brain-inspired AI
May 18, 2023Despite its successes, to date Artificial Intelligence (AI) is still characterized by a number of shortcomings with regards to different application domains and goals. These limitations are arguably both conceptual (e.g., related to underlying theoretical models, such as symbolic vs. connectionist), and operational (e.g., related to robustness and ability to generalize). Biologically inspired AI, and more specifically brain-inspired AI, promises to provide further biological aspects beyond those that are already traditionally included in AI, making it possible to assess and possibly overcome some of its present shortcomings. This article examines some conceptual, technical, and ethical issues raised by the development and use of brain-inspired AI. Against this background, the paper asks whether there is anything ethically unique about brain-inspired AI. The aim of the paper is to introduce a method that has a heuristic nature and that can be applied to identify and address the ethical issues arising from brain-inspired AI. The conclusion resulting from the application of this method is that, compared to traditional AI, brain-inspired AI raises new foundational ethical issues and some new practical ethical issues, and exacerbates some of the issues raised by traditional AI.
Autonomous Open-Ended Learning of Tasks with Non-Stationary Interdependencies
May 16, 2022
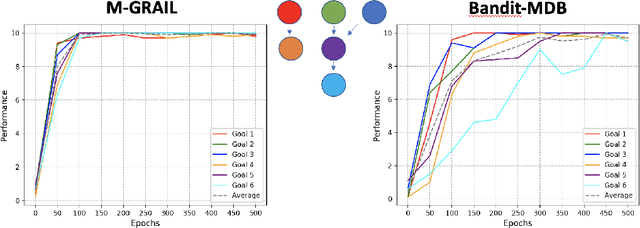
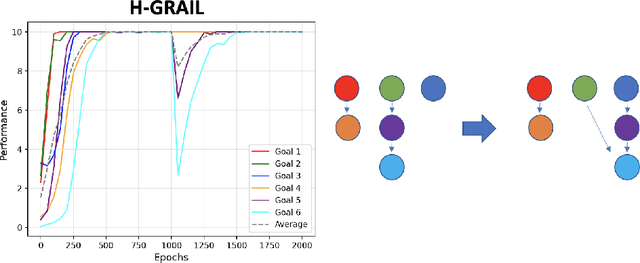
Autonomous open-ended learning is a relevant approach in machine learning and robotics, allowing the design of artificial agents able to acquire goals and motor skills without the necessity of user assigned tasks. A crucial issue for this approach is to develop strategies to ensure that agents can maximise their competence on as many tasks as possible in the shortest possible time. Intrinsic motivations have proven to generate a task-agnostic signal to properly allocate the training time amongst goals. While the majority of works in the field of intrinsically motivated open-ended learning focus on scenarios where goals are independent from each other, only few of them studied the autonomous acquisition of interdependent tasks, and even fewer tackled scenarios where goals involve non-stationary interdependencies. Building on previous works, we tackle these crucial issues at the level of decision making (i.e., building strategies to properly select between goals), and we propose a hierarchical architecture that treating sub-tasks selection as a Markov Decision Process is able to properly learn interdependent skills on the basis of intrinsically generated motivations. In particular, we first deepen the analysis of a previous system, showing the importance of incorporating information about the relationships between tasks at a higher level of the architecture (that of goal selection). Then we introduce H-GRAIL, a new system that extends the previous one by adding a new learning layer to store the autonomously acquired sequences of tasks to be able to modify them in case the interdependencies are non-stationary. All systems are tested in a real robotic scenario, with a Baxter robot performing multiple interdependent reaching tasks.
A Computational Model of Representation Learning in the Brain Cortex, Integrating Unsupervised and Reinforcement Learning
Jun 07, 2021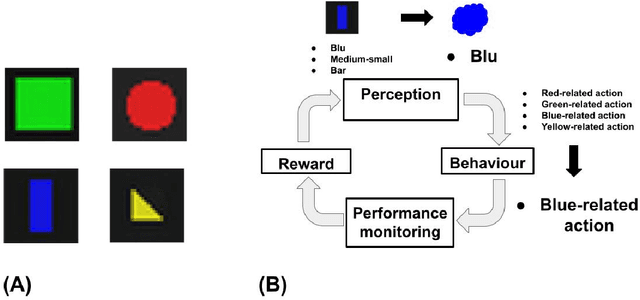
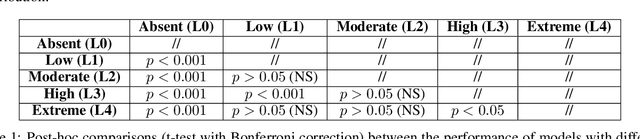
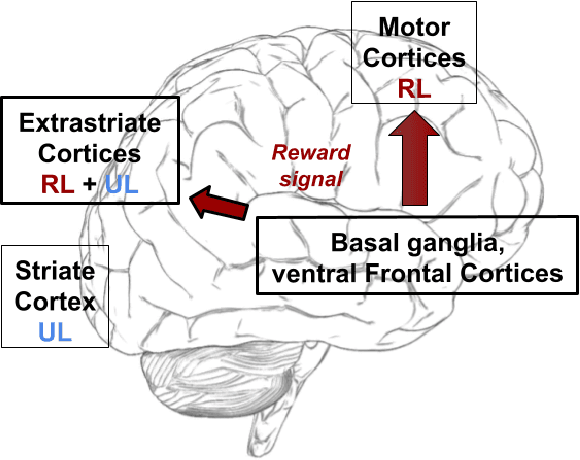
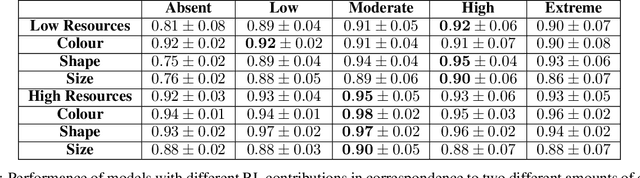
A common view on the brain learning processes proposes that the three classic learning paradigms -- unsupervised, reinforcement, and supervised -- take place in respectively the cortex, the basal-ganglia, and the cerebellum. However, dopamine outbursts, usually assumed to encode reward, are not limited to the basal ganglia but also reach prefrontal, motor, and higher sensory cortices. We propose that in the cortex the same reward-based trial-and-error processes might support not only the acquisition of motor representations but also of sensory representations. In particular, reward signals might guide trial-and-error processes that mix with associative learning processes to support the acquisition of representations better serving downstream action selection. We tested the soundness of this hypothesis with a computational model that integrates unsupervised learning (Contrastive Divergence) and reinforcement learning (REINFORCE). The model was tested with a task requiring different responses to different visual images grouped in categories involving either colour, shape, or size. Results show that a balanced mix of unsupervised and reinforcement learning processes leads to the best performance. Indeed, excessive unsupervised learning tends to under-represent task-relevant features while excessive reinforcement learning tends to initially learn slowly and then to incur in local minima. These results stimulate future empirical studies on category learning directed to investigate similar effects in the extrastriate visual cortices. Moreover, they prompt further computational investigations directed to study the possible advantages of integrating unsupervised and reinforcement learning processes.
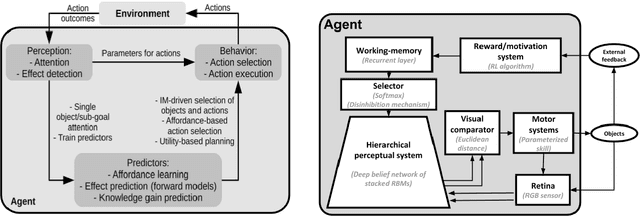
An open-ended learning architecture to face the REAL 2020 simulated robot competition
Nov 27, 2020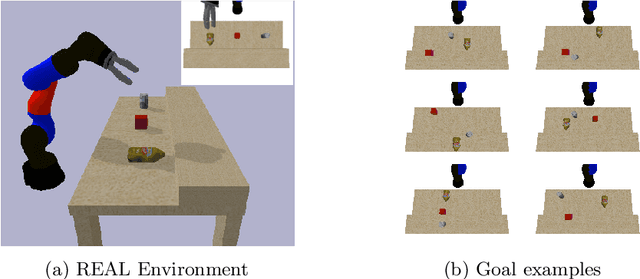
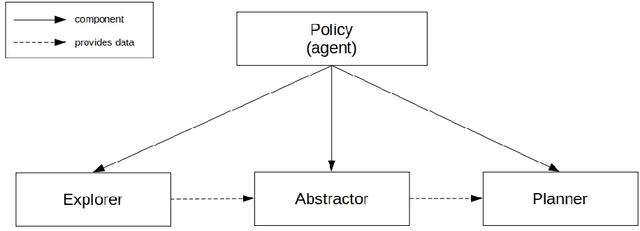

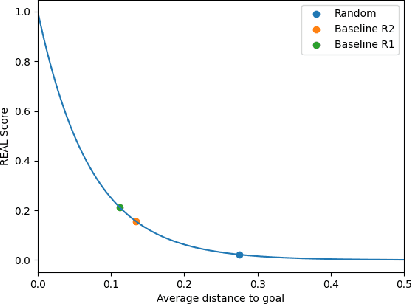
Open-ended learning is a core research field of machine learning and robotics aiming to build learning machines and robots able to autonomously acquire knowledge and skills and to reuse them to solve novel tasks. The multiple challenges posed by open-ended learning have been operationalized in the robotic competition REAL 2020. This requires a simulated camera-arm-gripper robot to (a) autonomously learn to interact with objects during an intrinsic phase where it can learn how to move objects and then (b) during an extrinsic phase, to re-use the acquired knowledge to accomplish externally given goals requiring the robot to move objects to specific locations unknown during the intrinsic phase. Here we present a 'baseline architecture' for solving the challenge, provided as baseline model for REAL 2020. Few models have all the functionalities needed to solve the REAL 2020 benchmark and none has been tested with it yet. The architecture we propose is formed by three components: (1) Abstractor: abstracting sensory input to learn relevant control variables from images; (2) Explorer: generating experience to learn goals and actions; (3) Planner: formulating and executing action plans to accomplish the externally provided goals. The architecture represents the first model to solve the simpler REAL 2020 'Round 1' allowing the use of a simple parameterised push action. On Round 2, the architecture was used with a more general action (sequence of joints positions) achieving again higher than chance level performance. The baseline software is well documented and available for download and use at https://github.com/AIcrowd/REAL2020_starter_kit.
Autonomous learning of multiple, context-dependent tasks
Nov 27, 2020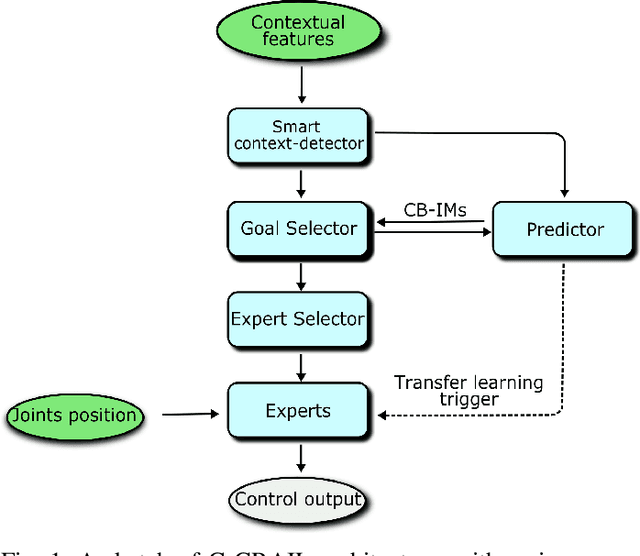
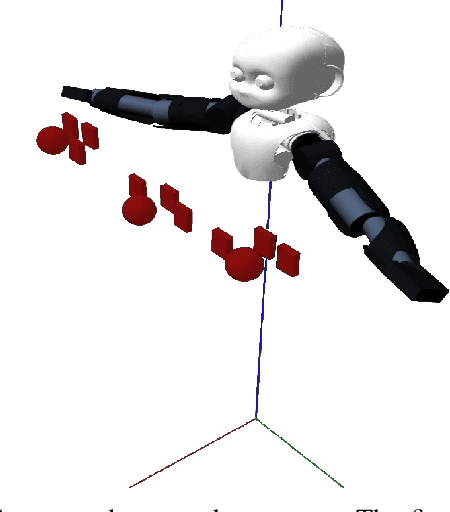
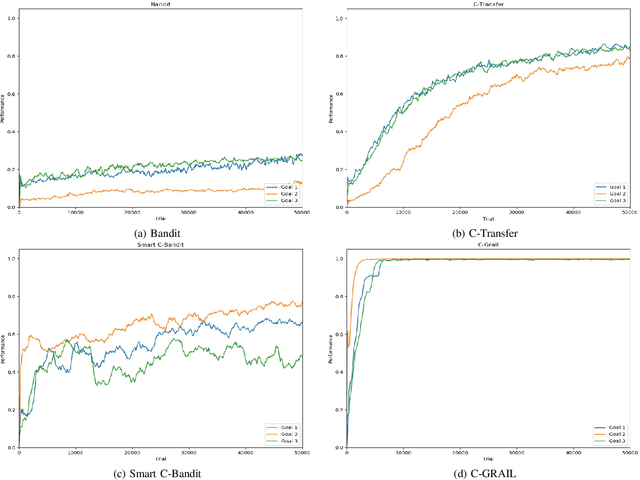
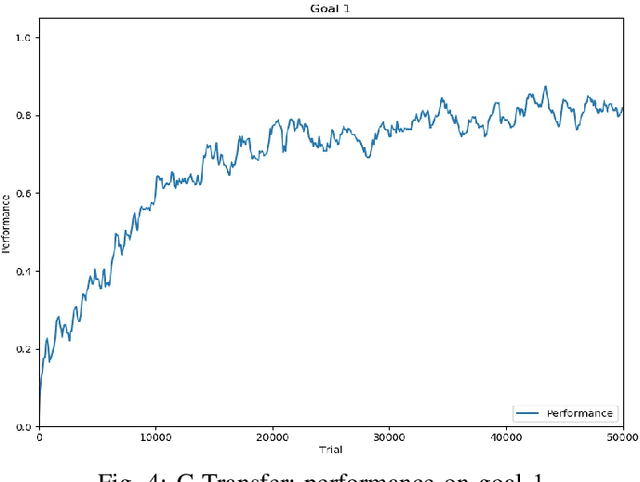
When facing the problem of autonomously learning multiple tasks with reinforcement learning systems, researchers typically focus on solutions where just one parametrised policy per task is sufficient to solve them. However, in complex environments presenting different contexts, the same task might need a set of different skills to be solved. These situations pose two challenges: (a) to recognise the different contexts that need different policies; (b) quickly learn the policies to accomplish the same tasks in the new discovered contexts. These two challenges are even harder if faced within an open-ended learning framework where an agent has to autonomously discover the goals that it might accomplish in a given environment, and also to learn the motor skills to accomplish them. We propose a novel open-ended learning robot architecture, C-GRAIL, that solves the two challenges in an integrated fashion. In particular, the architecture is able to detect new relevant contests, and ignore irrelevant ones, on the basis of the decrease of the expected performance for a given goal. Moreover, the architecture can quickly learn the policies for the new contexts by exploiting transfer learning importing knowledge from already acquired policies. The architecture is tested in a simulated robotic environment involving a robot that autonomously learns to reach relevant target objects in the presence of multiple obstacles generating several different obstacles. The proposed architecture outperforms other models not using the proposed autonomous context-discovery and transfer-learning mechanisms.
Optimal Options for Multi-Task Reinforcement Learning Under Time Constraints
Jan 06, 2020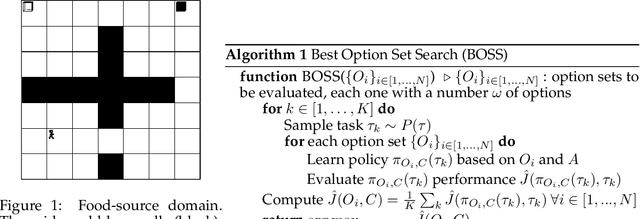
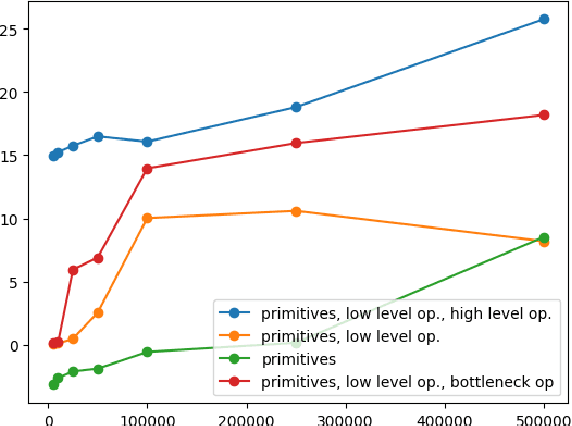
Reinforcement learning can greatly benefit from the use of options as a way of encoding recurring behaviours and to foster exploration. An important open problem is how can an agent autonomously learn useful options when solving particular distributions of related tasks. We investigate some of the conditions that influence optimality of options, in settings where agents have a limited time budget for learning each task and the task distribution might involve problems with different levels of similarity. We directly search for optimal option sets and show that the discovered options significantly differ depending on factors such as the available learning time budget and that the found options outperform popular option-generation heuristics.
Representation Internal-Manipulation (RIM): A Neuro-Inspired Computational Theory of Consciousness
Dec 31, 2019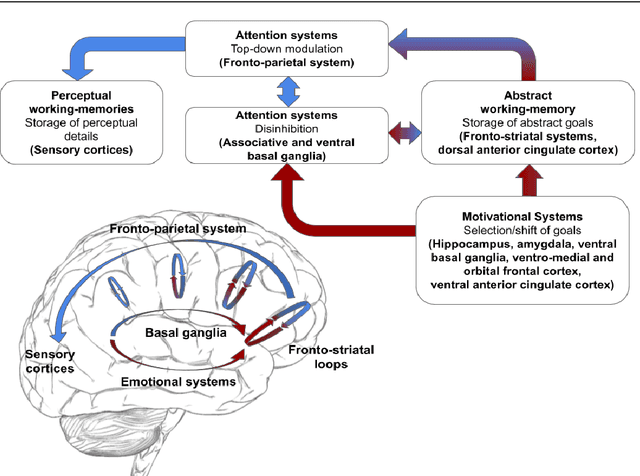
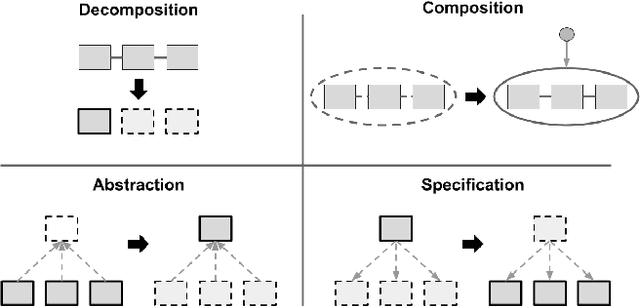
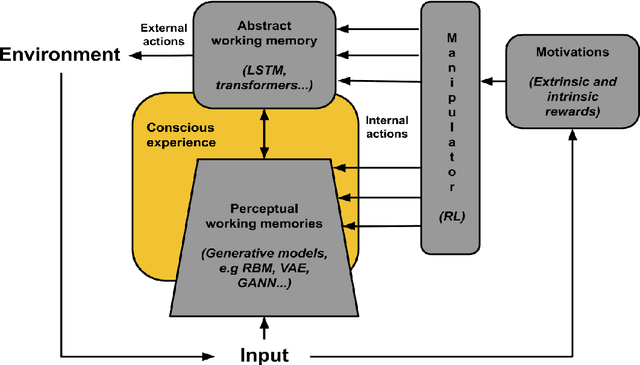
Many theories, based on neuroscientific and psychological empirical evidence and on computational concepts, have been elaborated to explain the emergence of consciousness in the central nervous system. These theories propose key fundamental mechanisms to explain consciousness, but they only partially connect such mechanisms to the possible functional and adaptive role of consciousness. Recently, some cognitive and neuroscientific models try to solve this gap by linking consciousness to various aspects of goal-directed behaviour, the pivotal cognitive process that allows mammals to flexibly act in challenging environments. Here we propose the Representation Internal-Manipulation (RIM) theory of consciousness, a theory that links the main elements of consciousness theories to components and functions of goal-directed behaviour, ascribing a central role for consciousness to the goal-directed manipulation of internal representations. This manipulation relies on four specific computational operations to perform the flexible internal adaptation of all key elements of goal-directed computation, from the representations of objects to those of goals, actions, and plans. Finally, we propose the concept of `manipulation agency' relating the sense of agency to the internal manipulation of representations. This allows us to propose that the subjective experience of consciousness is associated to the human capacity to generate and control a simulated internal reality that is vividly perceived and felt through the same perceptual and emotional mechanisms used to tackle the external world.