 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn analytical diabolo model for robotic learning and control
Nov 18, 2020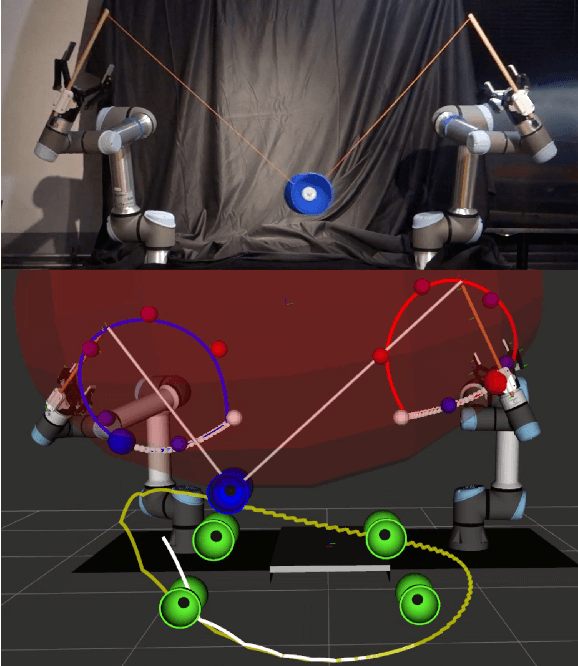

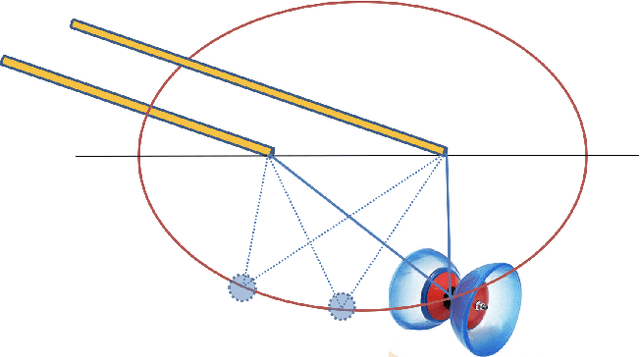
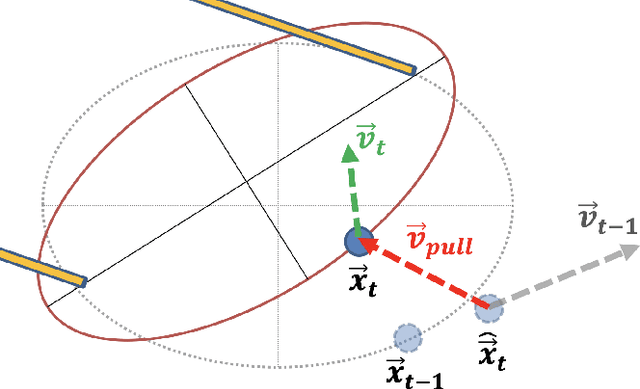
In this paper, we present a diabolo model that can be used for training agents in simulation to play diabolo, as well as running it on a real dual robot arm system. We first derive an analytical model of the diabolo-string system and compare its accuracy using data recorded via motion capture, which we release as a public dataset of skilled play with diabolos of different dynamics. We show that our model outperforms a deep-learning-based predictor, both in terms of precision and physically consistent behavior. Next, we describe a method based on optimal control to generate robot trajectories that produce the desired diabolo trajectory, as well as a system to transform higher-level actions into robot motions. Finally, we test our method on a real robot system by playing the diabolo, and throwing it to and catching it from a human player.
Team O2AS at the World Robot Summit 2018: An Approach to Robotic Kitting and Assembly Tasks using General Purpose Grippers and Tools
Mar 05, 2020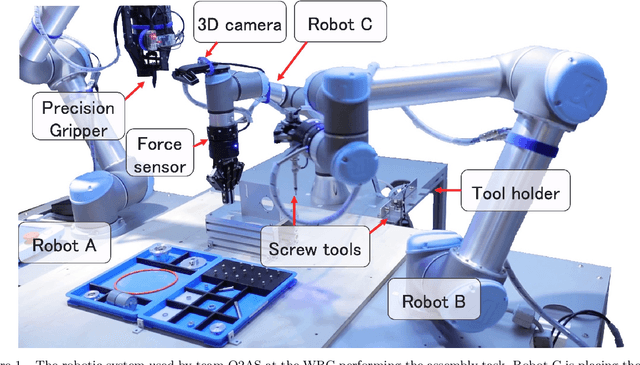
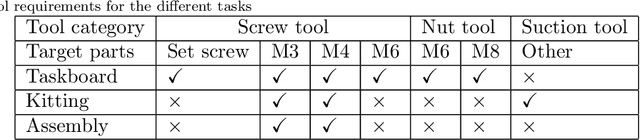
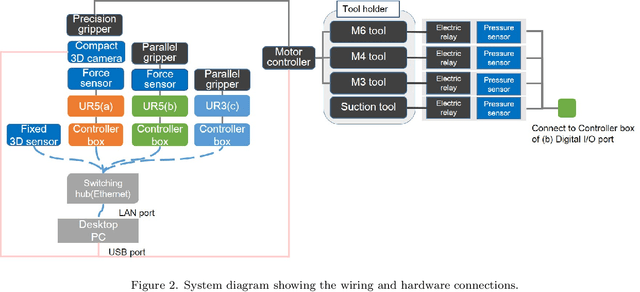

We propose a versatile robotic system for kitting and assembly tasks which uses no jigs or commercial tool changers. Instead of specialized end effectors, it uses its two-finger grippers to grasp and hold tools to perform subtasks such as screwing and suctioning. A third gripper is used as a precision picking and centering tool, and uses in-built passive compliance to compensate for small position errors and uncertainty. A novel grasp point detection for bin picking is described for the kitting task, using a single depth map. Using the proposed system we competed in the Assembly Challenge of the Industrial Robotics Category of the World Robot Challenge at the World Robot Summit 2018, obtaining 4th place and the SICE award for lean design and versatile tool use. We show the effectiveness of our approach through experiments performed during the competition.
Robots Assembling Machines: Learning from the World Robot Summit 2018 Assembly Challenge
Nov 14, 2019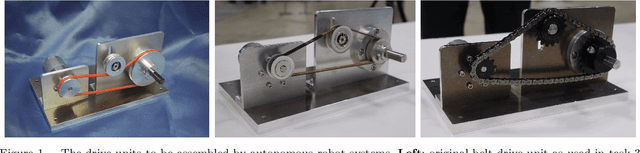
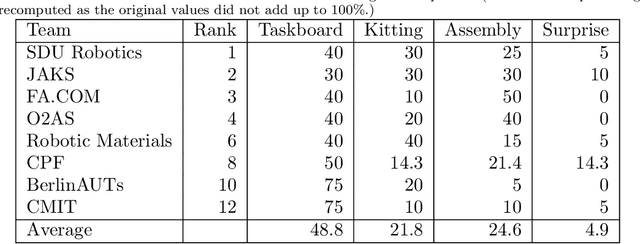
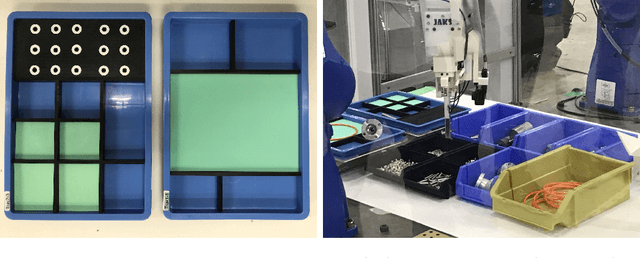
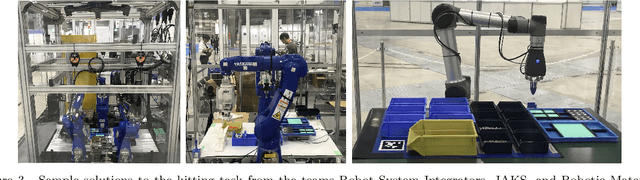
The Industrial Assembly Challenge at the World Robot Summit was held in 2018 to showcase the state-of-the-art of autonomous manufacturing systems. The challenge included various tasks, such as bin picking, kitting, and assembly of standard industrial parts into 2D and 3D assemblies. Some of the tasks were only revealed at the competition itself, representing the challenge of "level 5" automation, i. e., programming and setting up an autonomous assembly system in less than one day. We conducted a survey among the teams that participated in the challenge and investigated aspects such as team composition, development costs, system setups as well as the teams' strategies and approaches. An analysis of the survey results reveals that the competitors have been in two camps: those constructing conventional robotic work cells with off-the-shelf tools, and teams who mostly relied on custom-made end effectors and novel software approaches in combination with collaborative robots. While both camps performed reasonably well, the winning team chose a middle ground in between, combining the efficiency of established play-back programming with the autonomy gained by CAD-based object detection and force control for assembly operations.