 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExtreme Motion Generation via Hybrid Null-Space Control for Straight-Line Path Following
Jun 02, 2026This work studies ``extreme motion generation'', which aims to maximize the Cartesian path length along a pre-defined trajectory within the manipulator's workspace. This objective is important in industry as long as path-following is fundamental to a large variety of tasks such as surface coating and welding. More critically, extreme motion enables a fixed-base manipulator to exploit the kinematic capability under limited reachability. However, such exploitation is challenging in practice, as the manipulator must actively avoid the safety boundary through execution, which is inherently a long-horizon problem. Accordingly, we claim that long-horizon decision-making should be delegated to a learning-based policy to maximize exploitation, while a classical model-based controller covers the near-boundary region, where the learning policy degrades sharply due to sparse data coverage. In detail, our proposed method is a step-level hybrid controller that switches between an RL-based and a model-based controller according to the normalized joint-limit distance. The initial joint configuration is sampled through conditional diffusion-based sampling, which improves the achievable path length based on the learned motion prior. We evaluate the proposed framework on 10,000 straight-line path-following tasks with a 7-DoF Franka FR3, extending the average rollout length by 27\% over the model-based baseline. Notably, certain tasks yield a pronounced extension toward the motion extreme, as reflected in the maximum improvement reported in the statistical results. The project website and related videos of this paper can be found at https://yuan-xinyi.github.io/extreme-motion-generation/.
Differentiable Object Pose Connectivity Metrics for Regrasp Sequence Optimization
Apr 16, 2026Regrasp planning is often required when one pick-and-place cannot transfer an object from an initial pose to a goal pose while maintaining grasp feasibility. The main challenge is to reason about shared-grasp connectivity across intermediate poses, where discrete search becomes brittle. We propose an implicit multi-step regrasp planning framework based on differentiable pose sequence connectivity metrics. We model grasp feasibility under an object pose using an Energy-Based Model (EBM) and leverage energy additivity to construct a continuous energy landscape that measures pose-pair connectivity, enabling gradient-based optimization of intermediate object poses. An adaptive iterative deepening strategy is introduced to determine the minimum number of intermediate steps automatically. Experiments show that the proposed cost formulation provides smooth and informative gradients, improving planning robustness over other alternatives. They also demonstrate generalization to unseen grasp poses and cross-end-effector transfer, where a model trained with suction constraints can guide parallel gripper grasp manipulation. The multi-step planning results further highlight the effectiveness of adaptive deepening and minimum-step search.
Generalizable task-oriented object grasping through LLM-guided ontology and similarity-based planning
Mar 27, 2026Task-oriented grasping (TOG) is more challenging than simple object grasping because it requires precise identification of object parts and careful selection of grasping areas to ensure effective and robust manipulation. While recent approaches have trained large-scale vision-language models to integrate part-level object segmentation with task-aware grasp planning, their instability in part recognition and grasp inference limits their ability to generalize across diverse objects and tasks. To address this issue, we introduce a novel, geometry-centric strategy for more generalizable TOG that does not rely on semantic features from visual recognition, effectively overcoming the viewpoint sensitivity of model-based approaches. Our main proposals include: 1) an object-part-task ontology for functional part selection based on intuitive human commands, constructed using a Large Language Model (LLM); 2) a sampling-based geometric analysis method for identifying the selected object part from observed point clouds, incorporating multiple point distribution and distance metrics; and 3) a similarity matching framework for imitative grasp planning, utilizing similar known objects with pre-existing segmentation and grasping knowledge as references to guide the planning for unknown targets. We validate the high accuracy of our approach in functional part selection, identification, and grasp generation through real-world experiments. Additionally, we demonstrate the method's generalization capabilities to novel-category objects by extending existing ontological knowledge, showcasing its adaptability to a broad range of objects and tasks.
MosaicMem: Hybrid Spatial Memory for Controllable Video World Models
Mar 17, 2026Video diffusion models are moving beyond short, plausible clips toward world simulators that must remain consistent under camera motion, revisits, and intervention. Yet spatial memory remains a key bottleneck: explicit 3D structures can improve reprojection-based consistency but struggle to depict moving objects, while implicit memory often produces inaccurate camera motion even with correct poses. We propose Mosaic Memory (MosaicMem), a hybrid spatial memory that lifts patches into 3D for reliable localization and targeted retrieval, while exploiting the model's native conditioning to preserve prompt-following generation. MosaicMem composes spatially aligned patches in the queried view via a patch-and-compose interface, preserving what should persist while allowing the model to inpaint what should evolve. With PRoPE camera conditioning and two new memory alignment methods, experiments show improved pose adherence compared to implicit memory and stronger dynamic modeling than explicit baselines. MosaicMem further enables minute-level navigation, memory-based scene editing, and autoregressive rollout.
Replaceable Bit-based Gripper for Picking Cluttered Food Items
Jan 01, 2026The food packaging industry goes through changes in food items and their weights quite rapidly. These items range from easy-to-pick, single-piece food items to flexible, long and cluttered ones. We propose a replaceable bit-based gripper system to tackle the challenge of weight-based handling of cluttered food items. The gripper features specialized food attachments(bits) that enhance its grasping capabilities, and a belt replacement system allows switching between different food items during packaging operations. It offers a wide range of control options, enabling it to grasp and drop specific weights of granular, cluttered, and entangled foods. We specifically designed bits for two flexible food items that differ in shape: ikura(salmon roe) and spaghetti. They represent the challenging categories of sticky, granular food and long, sticky, cluttered food, respectively. The gripper successfully picked up both spaghetti and ikura and demonstrated weight-specific dropping of these items with an accuracy over 80% and 95% respectively. The gripper system also exhibited quick switching between different bits, leading to the handling of a large range of food items.
Soft Regrasping Tool Inspired by Jamming Gripper
Sep 17, 2025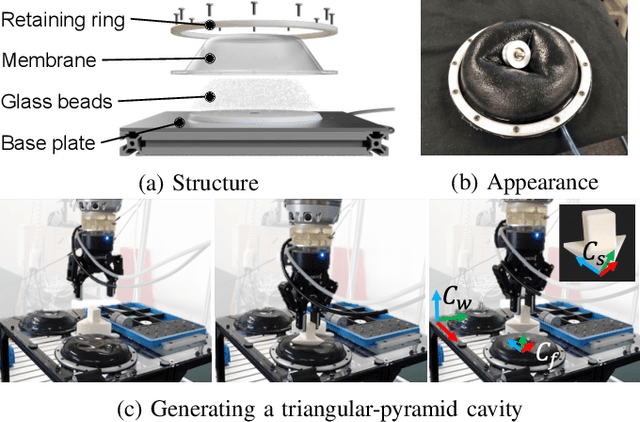
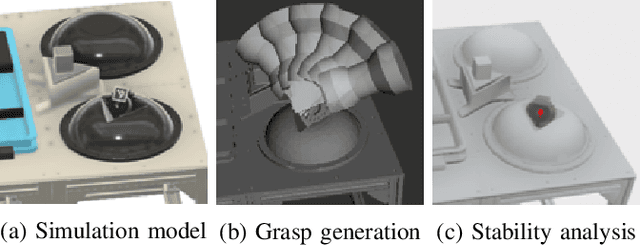
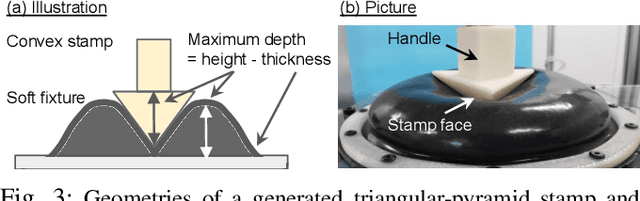
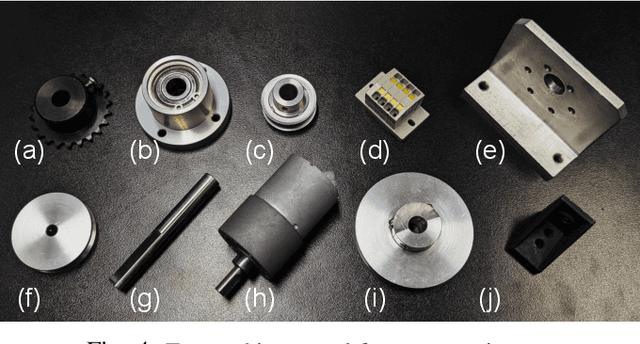
Regrasping on fixtures is a promising approach to reduce pose uncertainty in robotic assembly, but conventional rigid fixtures lack adaptability and require dedicated designs for each part. To overcome this limitation, we propose a soft jig inspired by the jamming transition phenomenon, which can be continuously deformed to accommodate diverse object geometries. By pressing a triangular-pyramid-shaped tool into the membrane and evacuating the enclosed air, a stable cavity is formed as a placement space. We further optimize the stamping depth to balance placement stability and gripper accessibility. In soft-jig-based regrasping, the key challenge lies in optimizing the cavity size to achieve precise dropping; once the part is reliably placed, subsequent grasping can be performed with reduced uncertainty. Accordingly, we conducted drop experiments on ten mechanical parts of varying shapes, which achieved placement success rates exceeding 80% for most objects and above 90% for cylindrical ones, while failures were mainly caused by geometric constraints and membrane properties. These results demonstrate that the proposed jig enables general-purpose, accurate, and repeatable regrasping, while also clarifying its current limitations and future potential as a practical alternative to rigid fixtures in assembly automation.
A Multi-Level Similarity Approach for Single-View Object Grasping: Matching, Planning, and Fine-Tuning
Jul 16, 2025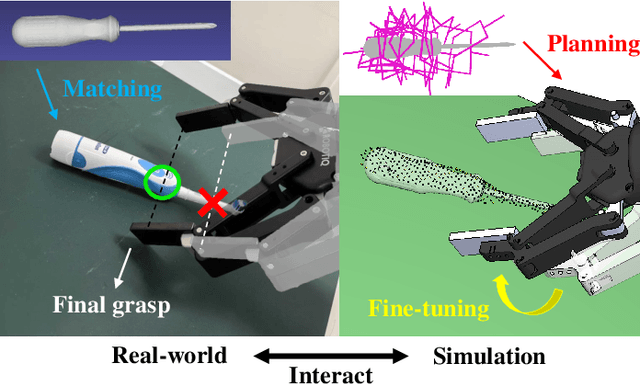
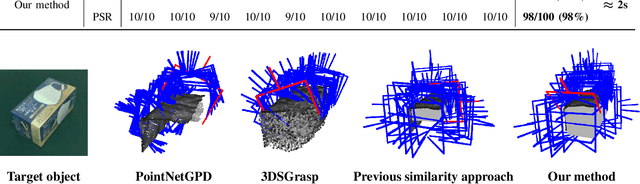
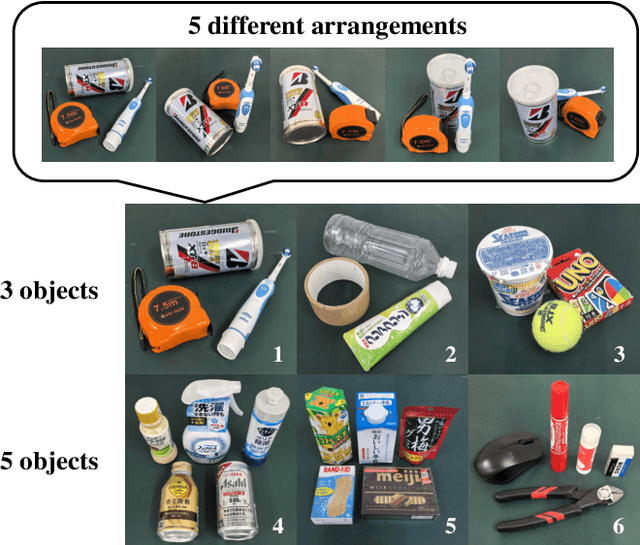
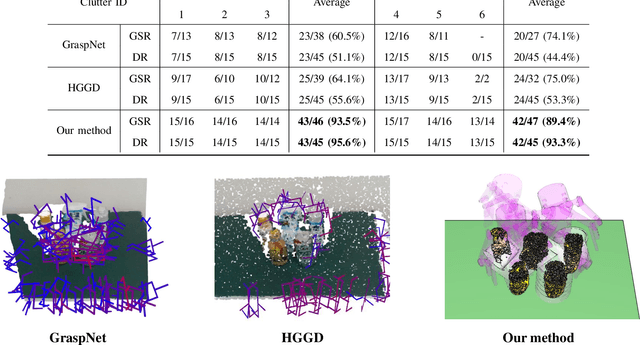
Grasping unknown objects from a single view has remained a challenging topic in robotics due to the uncertainty of partial observation. Recent advances in large-scale models have led to benchmark solutions such as GraspNet-1Billion. However, such learning-based approaches still face a critical limitation in performance robustness for their sensitivity to sensing noise and environmental changes. To address this bottleneck in achieving highly generalized grasping, we abandon the traditional learning framework and introduce a new perspective: similarity matching, where similar known objects are utilized to guide the grasping of unknown target objects. We newly propose a method that robustly achieves unknown-object grasping from a single viewpoint through three key steps: 1) Leverage the visual features of the observed object to perform similarity matching with an existing database containing various object models, identifying potential candidates with high similarity; 2) Use the candidate models with pre-existing grasping knowledge to plan imitative grasps for the unknown target object; 3) Optimize the grasp quality through a local fine-tuning process. To address the uncertainty caused by partial and noisy observation, we propose a multi-level similarity matching framework that integrates semantic, geometric, and dimensional features for comprehensive evaluation. Especially, we introduce a novel point cloud geometric descriptor, the C-FPFH descriptor, which facilitates accurate similarity assessment between partial point clouds of observed objects and complete point clouds of database models. In addition, we incorporate the use of large language models, introduce the semi-oriented bounding box, and develop a novel point cloud registration approach based on plane detection to enhance matching accuracy under single-view conditions. Videos are available at https://youtu.be/qQDIELMhQmk.
Bimanual Regrasp Planning and Control for Eliminating Object Pose Uncertainty
Mar 28, 2025Precisely grasping an object is a challenging task due to pose uncertainties. Conventional methods have used cameras and fixtures to reduce object uncertainty. They are effective but require intensive preparation, such as designing jigs based on the object geometry and calibrating cameras with high-precision tools fabricated using lasers. In this study, we propose a method to reduce the uncertainty of the position and orientation of a grasped object without using a fixture or a camera. Our method is based on the concept that the flat finger pads of a parallel gripper can reduce uncertainty along its opening/closing direction through flat surface contact. Three orthogonal grasps by parallel grippers with flat finger pads collectively constrain an object's position and orientation to a unique state. Guided by the concepts, we develop a regrasp planning and admittance control approach that sequentially finds and leverages three orthogonal grasps of two robotic arms to eliminate uncertainties in the object pose. We evaluated the proposed method on different initial object uncertainties and verified that the method has satisfactory repeatability accuracy. It outperforms an AR marker detection method implemented using cameras and laser jet printers under standard laboratory conditions.
IKSel: Selecting Good Seed Joint Values for Fast Numerical Inverse Kinematics Iterations
Mar 28, 2025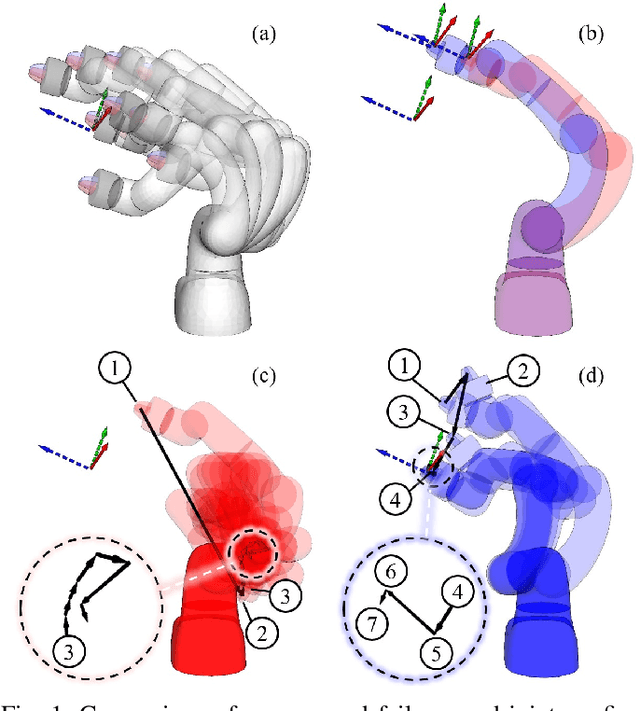
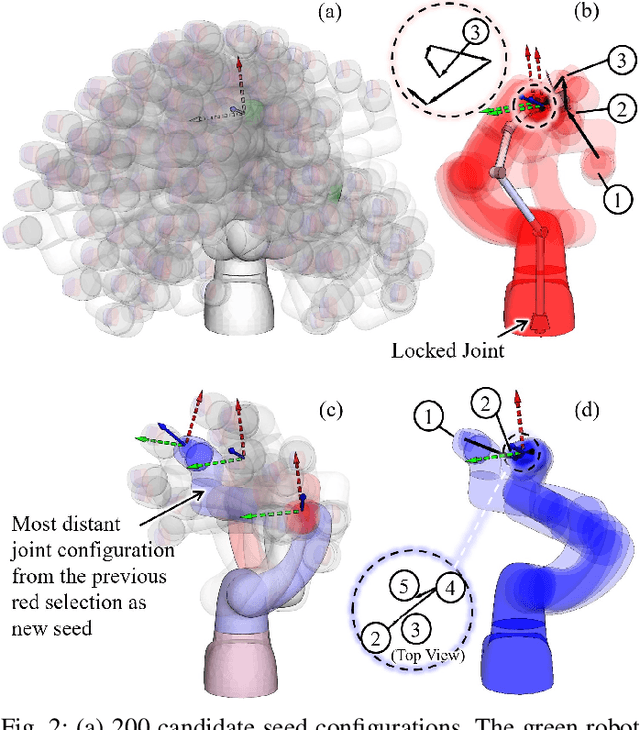
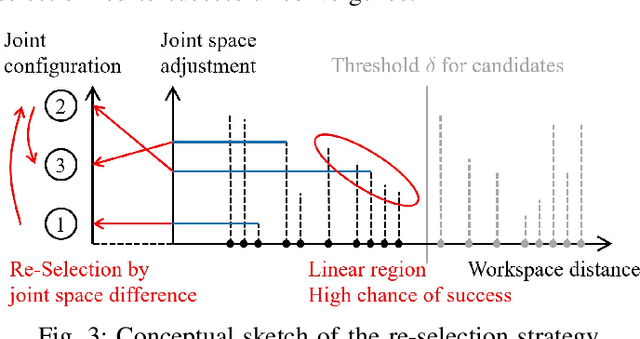
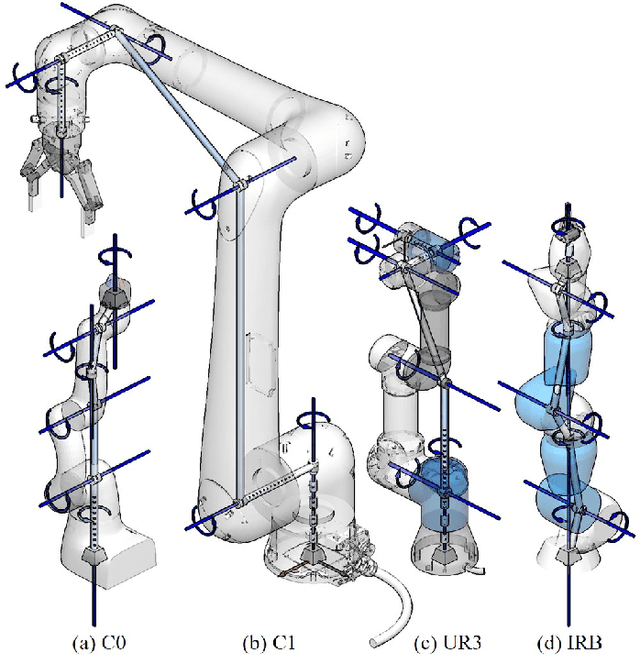
This paper revisits the numerical inverse kinematics (IK) problem, leveraging modern computational resources and refining the seed selection process to develop a solver that is competitive with analytical-based methods. The proposed seed selection strategy consists of three key stages: (1) utilizing a K-Dimensional Tree (KDTree) to identify seed candidates based on workspace proximity, (2) sorting candidates by joint space adjustment and attempting numerical iterations with the one requiring minimal adjustment, and (3) re-selecting the most distant joint configurations for new attempts in case of failures. The joint space adjustment-based seed selection increases the likelihood of rapid convergence, while the re-attempt strategy effectively helps circumvent local minima and joint limit constraints. Comparison results with both traditional numerical solvers and learning-based methods demonstrate the strengths of the proposed approach in terms of success rate, time efficiency, and accuracy. Additionally, we conduct detailed ablation studies to analyze the effects of various parameters and solver settings, providing practical insights for customization and optimization. The proposed method consistently exhibits high success rates and computational efficiency. It is suitable for time-sensitive applications.
Cooking Task Planning using LLM and Verified by Graph Network
Mar 27, 2025



Cooking tasks remain a challenging problem for robotics due to their complexity. Videos of people cooking are a valuable source of information for such task, but introduces a lot of variability in terms of how to translate this data to a robotic environment. This research aims to streamline this process, focusing on the task plan generation step, by using a Large Language Model (LLM)-based Task and Motion Planning (TAMP) framework to autonomously generate cooking task plans from videos with subtitles, and execute them. Conventional LLM-based task planning methods are not well-suited for interpreting the cooking video data due to uncertainty in the videos, and the risk of hallucination in its output. To address both of these problems, we explore using LLMs in combination with Functional Object-Oriented Networks (FOON), to validate the plan and provide feedback in case of failure. This combination can generate task sequences with manipulation motions that are logically correct and executable by a robot. We compare the execution of the generated plans for 5 cooking recipes from our approach against the plans generated by a few-shot LLM-only approach for a dual-arm robot setup. It could successfully execute 4 of the plans generated by our approach, whereas only 1 of the plans generated by solely using the LLM could be executed.