 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Group and Grasp Multiple Objects
Feb 12, 2025Simultaneously grasping and transporting multiple objects can significantly enhance robotic work efficiency and has been a key research focus for decades. The primary challenge lies in determining how to push objects, group them, and execute simultaneous grasping for respective groups while considering object distribution and the hardware constraints of the robot. Traditional rule-based methods struggle to flexibly adapt to diverse scenarios. To address this challenge, this paper proposes an imitation learning-based approach. We collect a series of expert demonstrations through teleoperation and train a diffusion policy network, enabling the robot to dynamically generate action sequences for pushing, grouping, and grasping, thereby facilitating efficient multi-object grasping and transportation. We conducted experiments to evaluate the method under different training dataset sizes, varying object quantities, and real-world object scenarios. The results demonstrate that the proposed approach can effectively and adaptively generate multi-object grouping and grasping strategies. With the support of more training data, imitation learning is expected to be an effective approach for solving the multi-object grasping problem.
OUXT Polaris: Autonomous Navigation System for the 2022 Maritime RobotX Challenge
Jun 24, 2023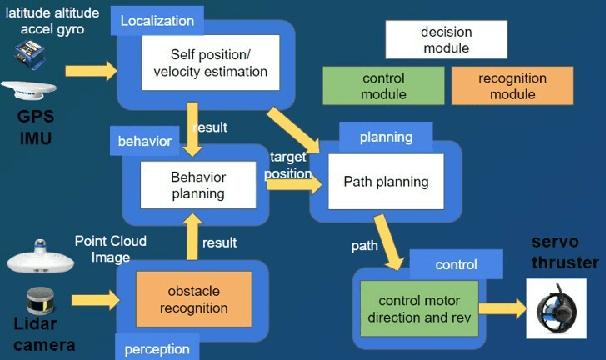
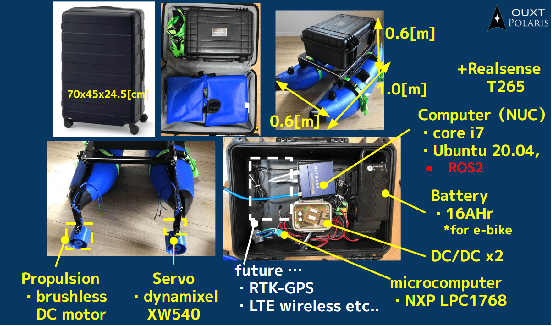
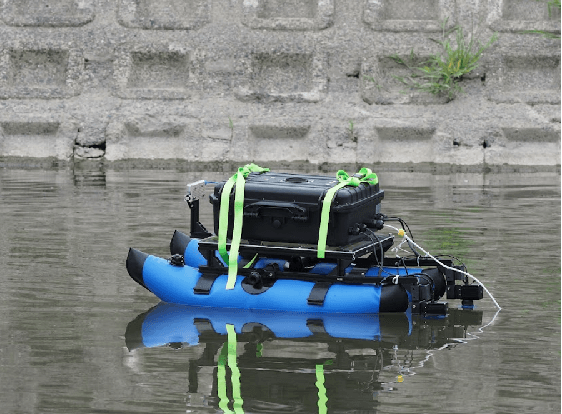
OUXT-Polaris has been developing an autonomous navigation system by participating in the Maritime RobotX Challenge 2014, 2016, and 2018. In this paper, we describe the improvement of the previous vessel system. We also indicate the advantage of the improved design. Moreover, we describe the developing method under Covid-19 using simulation / miniture-size hardware and the feature components for the next RobotX Challenge.