Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOUXT Polaris: Autonomous Navigation System for the 2022 Maritime RobotX Challenge
Paper and Code
Jun 24, 2023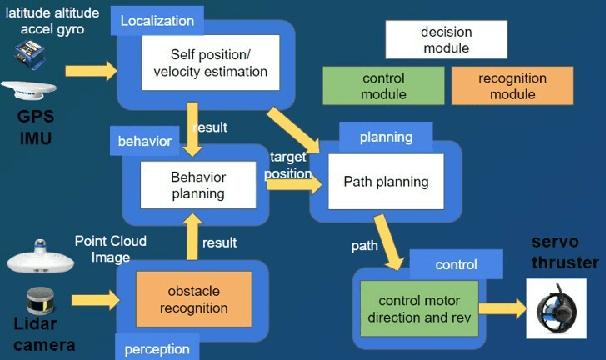
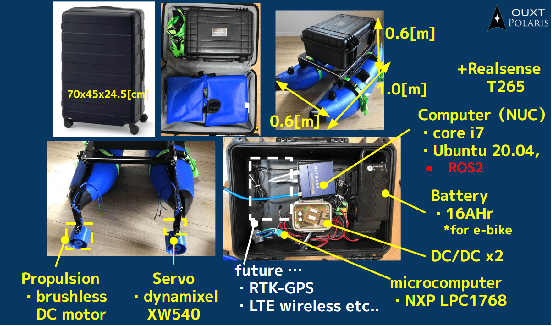
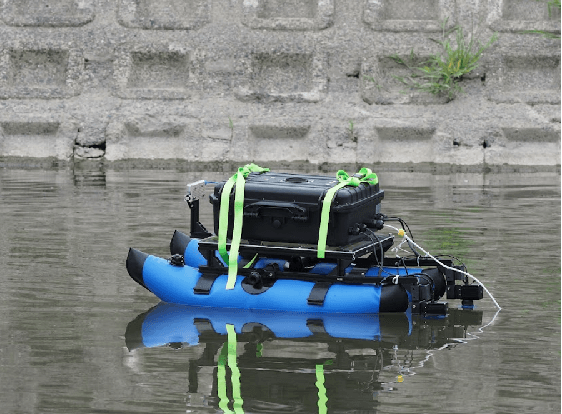
OUXT-Polaris has been developing an autonomous navigation system by participating in the Maritime RobotX Challenge 2014, 2016, and 2018. In this paper, we describe the improvement of the previous vessel system. We also indicate the advantage of the improved design. Moreover, we describe the developing method under Covid-19 using simulation / miniture-size hardware and the feature components for the next RobotX Challenge.
* Technical Design Paper of 2022 Maritime RobotX Challenge
View paper on