 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning a Sequence of Base Positions for a Mobile Manipulator to Perform Multiple Pick-and-Place Tasks
Oct 01, 2020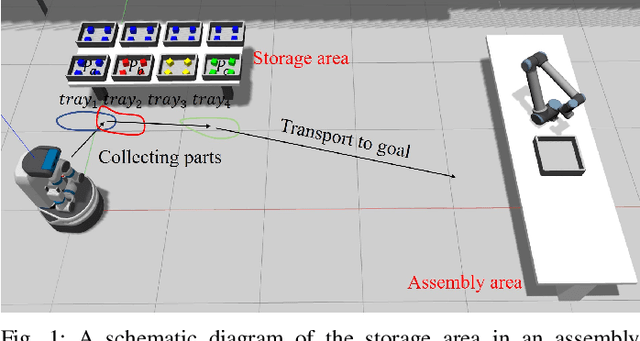

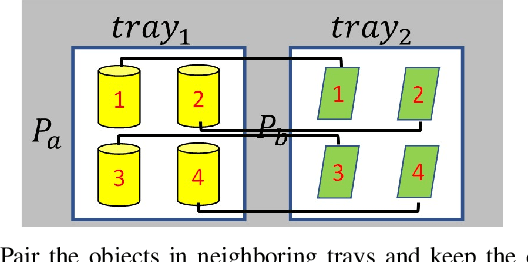
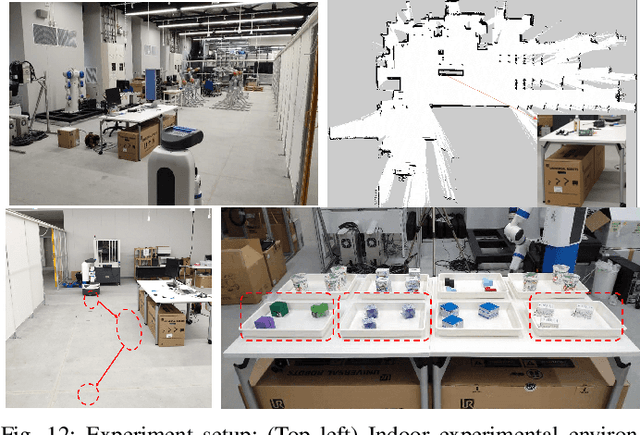
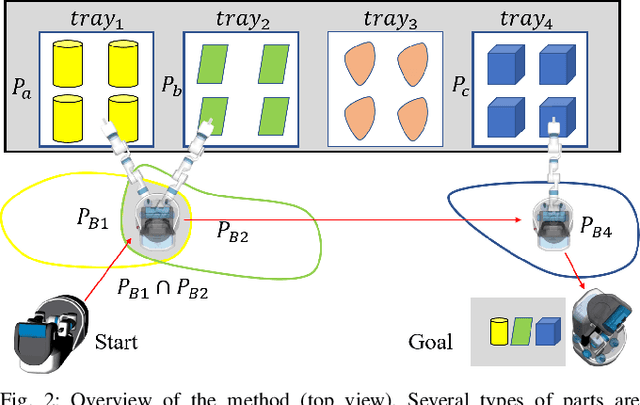
In this paper, we present a planner that plans a sequence of base positions for a mobile manipulator to efficiently and robustly collect objects stored in distinct trays. We achieve high efficiency by exploring the common areas where a mobile manipulator can grasp objects stored in multiple trays simultaneously and move the mobile manipulator to the common areas to reduce the time needed for moving the mobile base. We ensure robustness by optimizing the base position with the best clearance to positioning uncertainty so that a mobile manipulator can complete the task even if there is a certain deviation from the planned base positions. Besides, considering different styles of object placement in the tray, we analyze feasible schemes for dynamically updating the base positions based on either the remaining objects or the target objects to be picked in one round of the tasks. In the experiment part, we examine our planner on various scenarios, including different object placement: (1) Regularly placed toy objects; (2) Randomly placed industrial parts; and different schemes for online execution: (1) Apply globally static base positions; (2) Dynamically update the base positions. The experiment results demonstrate the efficiency, robustness and feasibility of the proposed method.
Team O2AS at the World Robot Summit 2018: An Approach to Robotic Kitting and Assembly Tasks using General Purpose Grippers and Tools
Mar 05, 2020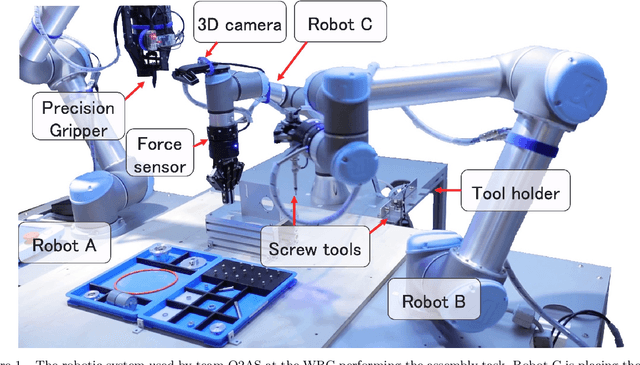
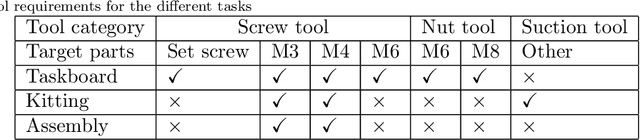
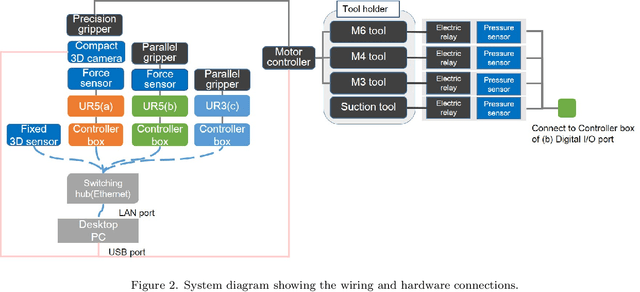

We propose a versatile robotic system for kitting and assembly tasks which uses no jigs or commercial tool changers. Instead of specialized end effectors, it uses its two-finger grippers to grasp and hold tools to perform subtasks such as screwing and suctioning. A third gripper is used as a precision picking and centering tool, and uses in-built passive compliance to compensate for small position errors and uncertainty. A novel grasp point detection for bin picking is described for the kitting task, using a single depth map. Using the proposed system we competed in the Assembly Challenge of the Industrial Robotics Category of the World Robot Challenge at the World Robot Summit 2018, obtaining 4th place and the SICE award for lean design and versatile tool use. We show the effectiveness of our approach through experiments performed during the competition.
Planning an Efficient and Robust Base Sequence for a Mobile Manipulator Performing Multiple Pick-and-place Tasks
Jan 22, 2020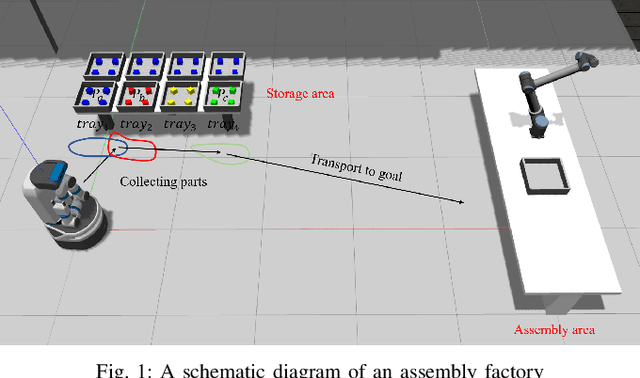
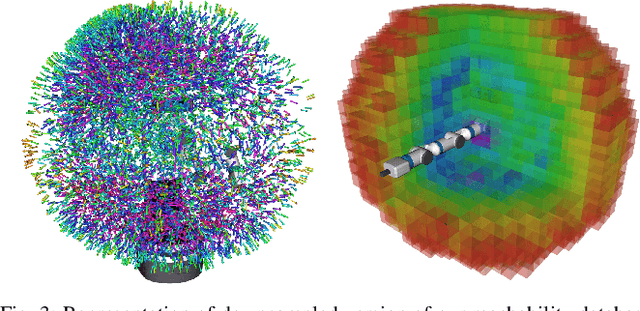

In this paper, we address efficiently and robustly collecting objects stored in different trays using a mobile manipulator. A resolution complete method, based on precomputed reachability database, is proposed to explore collision-free inverse kinematics (IK) solutions and then a resolution complete set of feasible base positions can be determined. This method approximates a set of representative IK solutions that are especially helpful when solving IK and checking collision are treated separately. For real world applications, we take into account the base positioning uncertainty and plan a sequence of base positions that reduce the number of necessary base movements for collecting the target objects, the base sequence is robust in that the mobile manipulator is able to complete the part-supply task even there is certain deviation from the planned base positions. Our experiments demonstrate both the efficiency compared to regular base sequence and the feasibility in real world applications.