 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConstructing Image-Text Pair Dataset from Books
Oct 03, 2023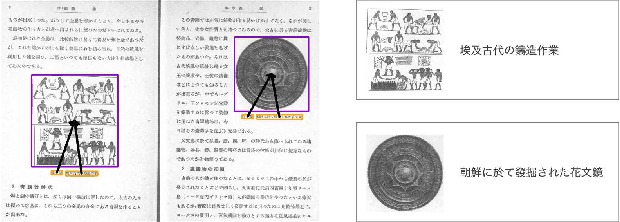
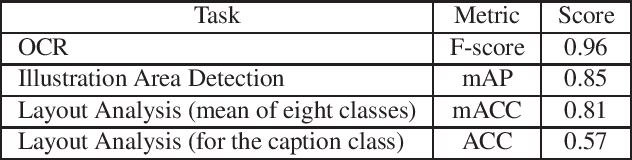
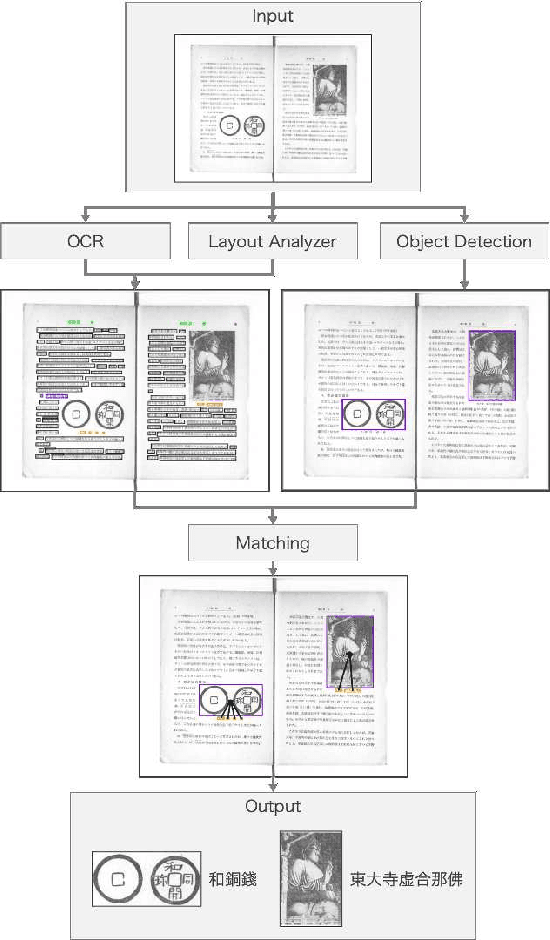
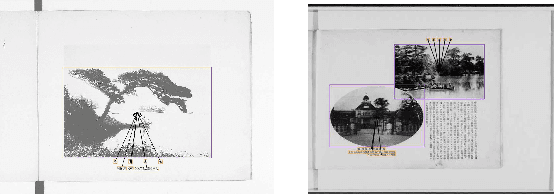
Digital archiving is becoming widespread owing to its effectiveness in protecting valuable books and providing knowledge to many people electronically. In this paper, we propose a novel approach to leverage digital archives for machine learning. If we can fully utilize such digitized data, machine learning has the potential to uncover unknown insights and ultimately acquire knowledge autonomously, just like humans read books. As a first step, we design a dataset construction pipeline comprising an optical character reader (OCR), an object detector, and a layout analyzer for the autonomous extraction of image-text pairs. In our experiments, we apply our pipeline on old photo books to construct an image-text pair dataset, showing its effectiveness in image-text retrieval and insight extraction.
An analytical diabolo model for robotic learning and control
Nov 18, 2020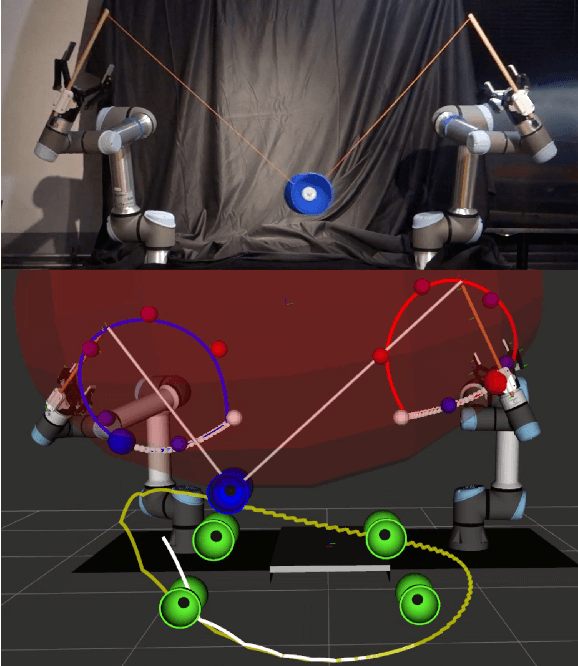

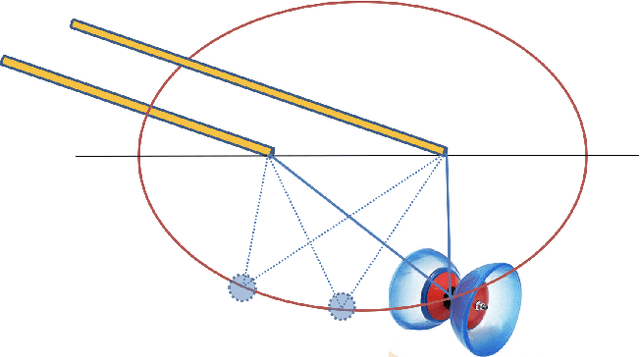
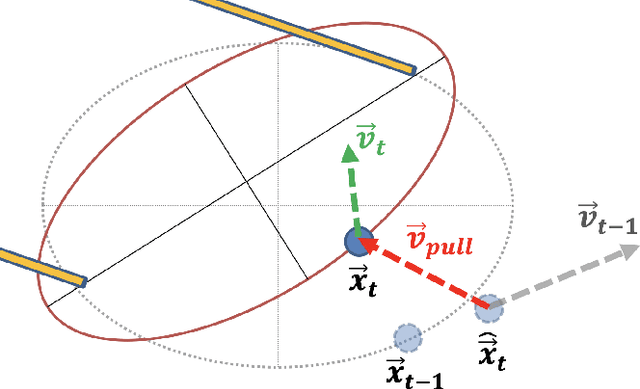
In this paper, we present a diabolo model that can be used for training agents in simulation to play diabolo, as well as running it on a real dual robot arm system. We first derive an analytical model of the diabolo-string system and compare its accuracy using data recorded via motion capture, which we release as a public dataset of skilled play with diabolos of different dynamics. We show that our model outperforms a deep-learning-based predictor, both in terms of precision and physically consistent behavior. Next, we describe a method based on optimal control to generate robot trajectories that produce the desired diabolo trajectory, as well as a system to transform higher-level actions into robot motions. Finally, we test our method on a real robot system by playing the diabolo, and throwing it to and catching it from a human player.
Team O2AS at the World Robot Summit 2018: An Approach to Robotic Kitting and Assembly Tasks using General Purpose Grippers and Tools
Mar 05, 2020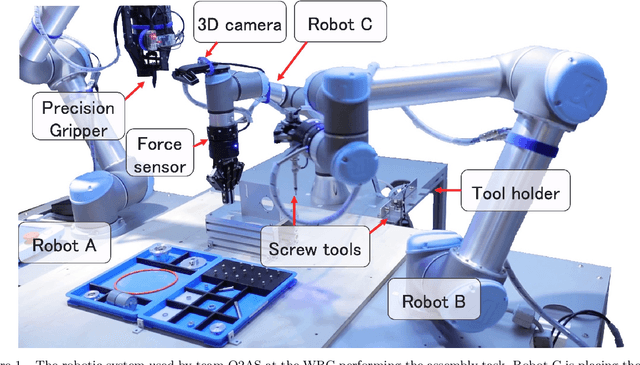
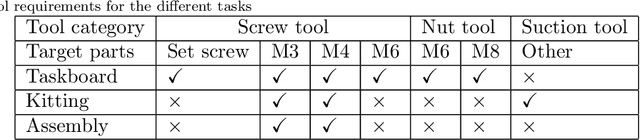
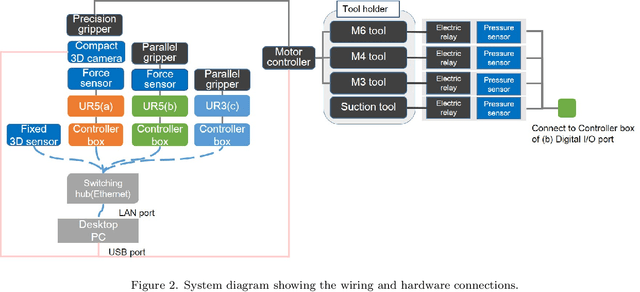

We propose a versatile robotic system for kitting and assembly tasks which uses no jigs or commercial tool changers. Instead of specialized end effectors, it uses its two-finger grippers to grasp and hold tools to perform subtasks such as screwing and suctioning. A third gripper is used as a precision picking and centering tool, and uses in-built passive compliance to compensate for small position errors and uncertainty. A novel grasp point detection for bin picking is described for the kitting task, using a single depth map. Using the proposed system we competed in the Assembly Challenge of the Industrial Robotics Category of the World Robot Challenge at the World Robot Summit 2018, obtaining 4th place and the SICE award for lean design and versatile tool use. We show the effectiveness of our approach through experiments performed during the competition.