 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRFS: Reinforcement learning with Residual flow steering for dexterous manipulation
Feb 03, 2026Imitation learning has emerged as an effective approach for bootstrapping sequential decision-making in robotics, achieving strong performance even in high-dimensional dexterous manipulation tasks. Recent behavior cloning methods further leverage expressive generative models, such as diffusion models and flow matching, to represent multimodal action distributions. However, policies pretrained in this manner often exhibit limited generalization and require additional fine-tuning to achieve robust performance at deployment time. Such adaptation must preserve the global exploration benefits of pretraining while enabling rapid correction of local execution errors. We propose Residual Flow Steering(RFS), a data-efficient reinforcement learning framework for adapting pretrained generative policies. RFS steers a pretrained flow-matching policy by jointly optimizing a residual action and a latent noise distribution, enabling complementary forms of exploration: local refinement through residual corrections and global exploration through latent-space modulation. This design allows efficient adaptation while retaining the expressive structure of the pretrained policy. We demonstrate the effectiveness of RFS on dexterous manipulation tasks, showing efficient fine-tuning in both simulation and real-world settings when adapting pretrained base policies. Project website:https://weirdlabuw.github.io/rfs.
DRAWER: Digital Reconstruction and Articulation With Environment Realism
Apr 22, 2025Creating virtual digital replicas from real-world data unlocks significant potential across domains like gaming and robotics. In this paper, we present DRAWER, a novel framework that converts a video of a static indoor scene into a photorealistic and interactive digital environment. Our approach centers on two main contributions: (i) a reconstruction module based on a dual scene representation that reconstructs the scene with fine-grained geometric details, and (ii) an articulation module that identifies articulation types and hinge positions, reconstructs simulatable shapes and appearances and integrates them into the scene. The resulting virtual environment is photorealistic, interactive, and runs in real time, with compatibility for game engines and robotic simulation platforms. We demonstrate the potential of DRAWER by using it to automatically create an interactive game in Unreal Engine and to enable real-to-sim-to-real transfer for robotics applications.
Sim2Real Manipulation on Unknown Objects with Tactile-based Reinforcement Learning
Mar 18, 2024Using tactile sensors for manipulation remains one of the most challenging problems in robotics. At the heart of these challenges is generalization: How can we train a tactile-based policy that can manipulate unseen and diverse objects? In this paper, we propose to perform Reinforcement Learning with only visual tactile sensing inputs on diverse objects in a physical simulator. By training with diverse objects in simulation, it enables the policy to generalize to unseen objects. However, leveraging simulation introduces the Sim2Real transfer problem. To mitigate this problem, we study different tactile representations and evaluate how each affects real-robot manipulation results after transfer. We conduct our experiments on diverse real-world objects and show significant improvements over baselines for the pivoting task. Our project page is available at https://tactilerl.github.io/.
Differentiable Robotic Manipulation of Deformable Rope-like Objects Using Compliant Position-based Dynamics
Feb 20, 2022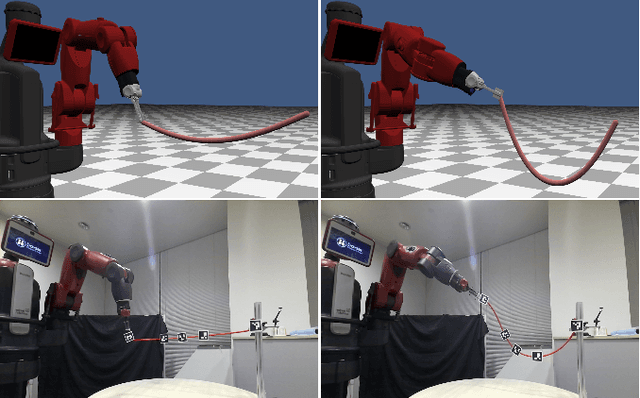

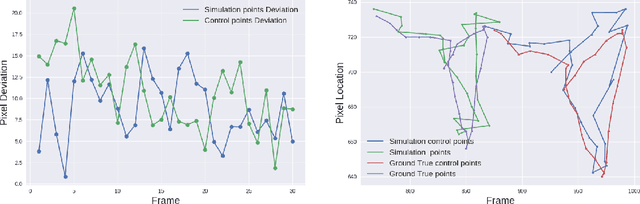
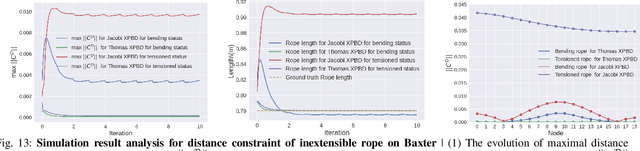
Robot manipulation of rope-like objects is an interesting problem that has some critical applications, such as autonomous robotic suturing. Solving for and controlling rope is difficult due to the complexity of rope physics and the challenge of building fast and accurate models of deformable materials. While more data-driven approaches have become more popular for finding controllers that learn to do a single task, there is still a strong motivation for a model-based method that could be used to solve a large variety of optimization problems. Towards this end, we introduced compliant, position-based dynamics (XPBD) to model rope-like objects. Using geometric constraints, the model can represent the coupling of shear/stretch and bend/twist effects. Of crucial importance is that our formulation is differentiable, which can solve parameter estimation problems and improve the matching of rope physics to real-life scenarios (i.e., the real-to-sim problem). For the generality of rope-like objects, two different solvers are proposed to handle the inextensible and extensible effects of varied material stiffness for the rope. We demonstrate our framework's robustness and accuracy on real-to-sim experimental setups using the Baxter robot and the da Vinci research kit (DVRK). Our work leads to a new path for robotic manipulation of the deformable rope-like object taking advantage of the ready-to-use gradients.
Parameter Identification and Motion Control for Articulated Rigid Body Robots Using Differentiable Position-based Dynamics
Jan 15, 2022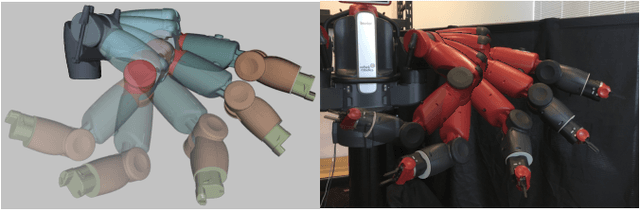
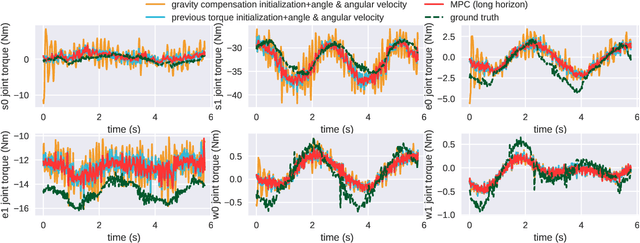
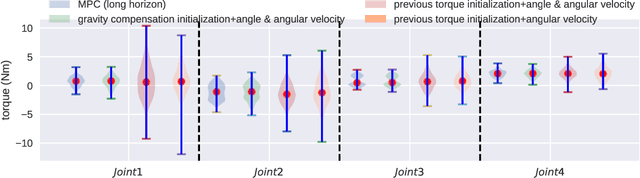
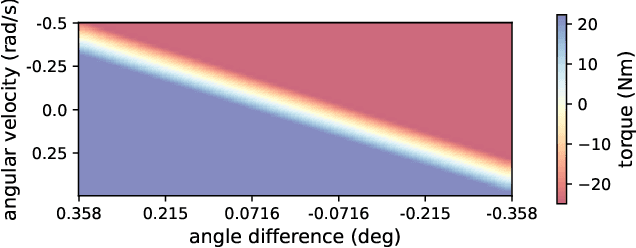
Simulation modeling of robots, objects, and environments is the backbone for all model-based control and learning. It is leveraged broadly across dynamic programming and model-predictive control, as well as data generation for imitation, transfer, and reinforcement learning. In addition to fidelity, key features of models in these control and learning contexts are speed, stability, and native differentiability. However, many popular simulation platforms for robotics today lack at least one of the features above. More recently, position-based dynamics (PBD) has become a very popular simulation tool for modeling complex scenes of rigid and non-rigid object interactions, due to its speed and stability, and is starting to gain significant interest in robotics for its potential use in model-based control and learning. Thus, in this paper, we present a mathematical formulation for coupling position-based dynamics (PBD) simulation and optimal robot design, model-based motion control and system identification. Our framework breaks down PBD definitions and derivations for various types of joint-based articulated rigid bodies. We present a back-propagation method with automatic differentiation, which can integrate both positional and angular geometric constraints. Our framework can critically provide the native gradient information and perform gradient-based optimization tasks. We also propose articulated joint model representations and simulation workflow for our differentiable framework. We demonstrate the capability of the framework in efficient optimal robot design, accurate trajectory torque estimation and supporting spring stiffness estimation, where we achieve minor errors. We also implement impedance control in real robots to demonstrate the potential of our differentiable framework in human-in-the-loop applications.