 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyperspectral Vision Transformers for Greenhouse Gas Estimations from Space
Apr 23, 2025Hyperspectral imaging provides detailed spectral information and holds significant potential for monitoring of greenhouse gases (GHGs). However, its application is constrained by limited spatial coverage and infrequent revisit times. In contrast, multispectral imaging offers broader spatial and temporal coverage but often lacks the spectral detail that can enhance GHG detection. To address these challenges, this study proposes a spectral transformer model that synthesizes hyperspectral data from multispectral inputs. The model is pre-trained via a band-wise masked autoencoder and subsequently fine-tuned on spatio-temporally aligned multispectral-hyperspectral image pairs. The resulting synthetic hyperspectral data retain the spatial and temporal benefits of multispectral imagery and improve GHG prediction accuracy relative to using multispectral data alone. This approach effectively bridges the trade-off between spectral resolution and coverage, highlighting its potential to advance atmospheric monitoring by combining the strengths of hyperspectral and multispectral systems with self-supervised deep learning.
CromSS: Cross-modal pre-training with noisy labels for remote sensing image segmentation
May 02, 2024


We study the potential of noisy labels y to pretrain semantic segmentation models in a multi-modal learning framework for geospatial applications. Specifically, we propose a novel Cross-modal Sample Selection method (CromSS) that utilizes the class distributions P^{(d)}(x,c) over pixels x and classes c modelled by multiple sensors/modalities d of a given geospatial scene. Consistency of predictions across sensors $d$ is jointly informed by the entropy of P^{(d)}(x,c). Noisy label sampling we determine by the confidence of each sensor d in the noisy class label, P^{(d)}(x,c=y(x)). To verify the performance of our approach, we conduct experiments with Sentinel-1 (radar) and Sentinel-2 (optical) satellite imagery from the globally-sampled SSL4EO-S12 dataset. We pair those scenes with 9-class noisy labels sourced from the Google Dynamic World project for pretraining. Transfer learning evaluations (downstream task) on the DFC2020 dataset confirm the effectiveness of the proposed method for remote sensing image segmentation.
Task Specific Pretraining with Noisy Labels for Remote sensing Image Segmentation
Feb 25, 2024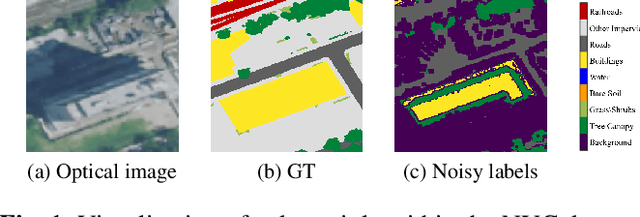
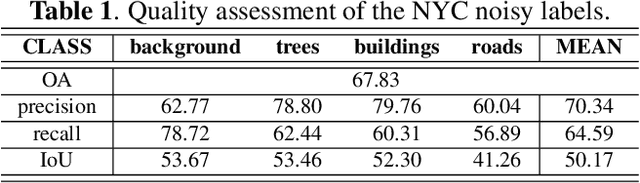
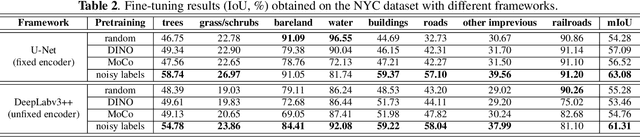
In recent years, self-supervision has drawn a lot of attention in remote sensing society due to its ability to reduce the demand of exact labels in supervised deep learning model training. Self-supervision methods generally utilize image-level information to pretrain models in an unsupervised fashion. Though these pretrained encoders show effectiveness in many downstream tasks, their performance on segmentation tasks is often not as good as that on classification tasks. On the other hand, many easily available label sources (e.g., automatic labeling tools and land cover land use products) exist, which can provide a large amount of noisy labels for segmentation model training. In this work, we propose to explore the under-exploited potential of noisy labels for segmentation task specific pretraining, and exam its robustness when confronted with mismatched categories and different decoders during fine-tuning. Specifically, we inspect the impacts of noisy labels on different layers in supervised model training to serve as the basis of our work. Experiments on two datasets indicate the effectiveness of task specific supervised pretraining with noisy labels. The findings are expected to shed light on new avenues for improving the accuracy and versatility of pretraining strategies for remote sensing image segmentation.
Quantification of Carbon Sequestration in Urban Forests
Jun 01, 2021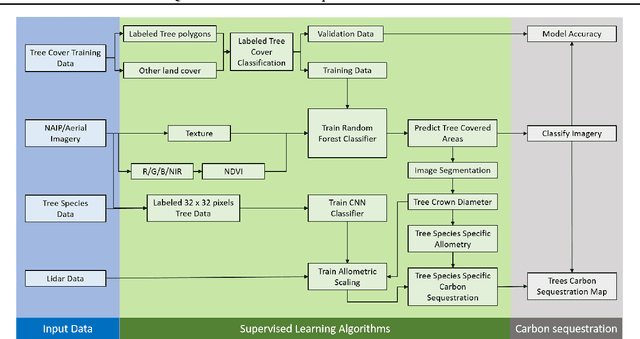



Vegetation, trees in particular, sequester carbon by absorbing carbon dioxide from the atmosphere, however, the lack of efficient quantification methods of carbon stored in trees renders it difficult to track the process. Here we present an approach to estimate the carbon storage in trees based on fusing multispectral aerial imagery and LiDAR data to identify tree coverage, geometric shape, and tree species, which are crucial attributes in carbon storage quantification. We demonstrate that tree species information and their three-dimensional geometric shapes can be estimated from remote imagery in order to calculate the tree's biomass. Specifically, for Manhattan, New York City, we estimate a total of $52,000$ tons of carbon sequestered in trees.
Map Generation from Large Scale Incomplete and Inaccurate Data Labels
May 20, 2020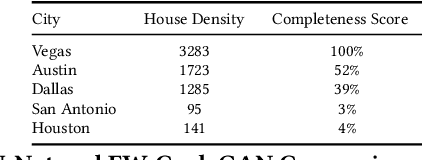
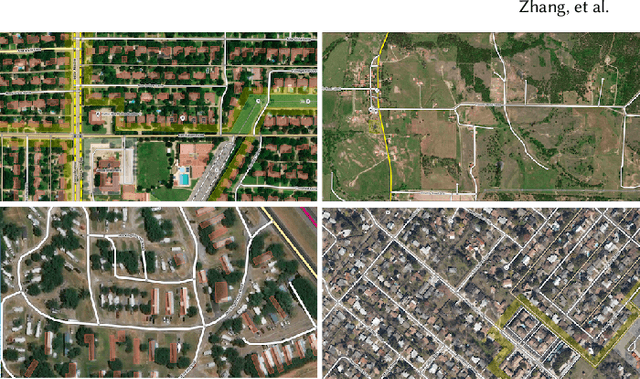
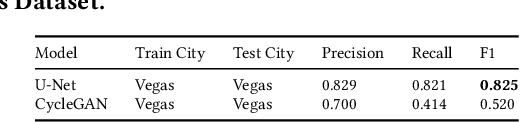
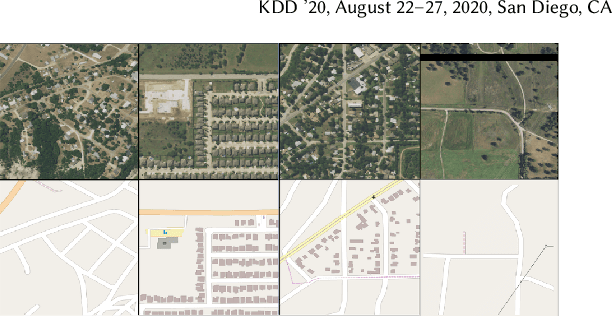
Accurately and globally mapping human infrastructure is an important and challenging task with applications in routing, regulation compliance monitoring, and natural disaster response management etc.. In this paper we present progress in developing an algorithmic pipeline and distributed compute system that automates the process of map creation using high resolution aerial images. Unlike previous studies, most of which use datasets that are available only in a few cities across the world, we utilizes publicly available imagery and map data, both of which cover the contiguous United States (CONUS). We approach the technical challenge of inaccurate and incomplete training data adopting state-of-the-art convolutional neural network architectures such as the U-Net and the CycleGAN to incrementally generate maps with increasingly more accurate and more complete labels of man-made infrastructure such as roads and houses. Since scaling the mapping task to CONUS calls for parallelization, we then adopted an asynchronous distributed stochastic parallel gradient descent training scheme to distribute the computational workload onto a cluster of GPUs with nearly linear speed-up.