 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArchitecture Shape Governs QNN Trainability: Jacobian Null Space Growth and Parameter Efficiency
May 07, 2026Variational quantum circuits with angle encoding implement truncated Fourier series, and architectures arranging $N$ qubits with $L$ encoding layers each -- sharing encoding budget $E = NL$ -- generate identical frequency spectra, identical frequency redundancy, and require the same minimum parameter count for coefficient control. Despite this equivalence, trainability varies substantially with architecture shape $(N,L)$ at fixed $E$. We identify structural rank deficiency of the coefficient matching Jacobian $J$ as the mechanism responsible. For serial single-qubit architectures, we prove $\mathrm{rank}(J) \leq 2L+1$ regardless of parameter count $P$, with $\dim(\ker J) \geq P-(2L+1)$ growing without bound -- a phenomenon we term \emph{structural gradient starvation}: a growing fraction of parameters become structurally decoupled from the loss as $P$ increases at fixed $L$. Parallel architectures avoid this via independent phase trajectories, ensuring $σ_{\min}(J^{(\mathrm{par})}) > 0$ generically for $P \leq 2E+1$, so no parameter lies in $\ker J$. For practitioners, we further show that the two natural routes to increasing parameter count have fundamentally different effects: adding feature map (FM) layers monotonically strengthens the Jacobian QFIM eigenvalue spectrum and achieves $R^2 \geq 0.95$ with $1.6$--$2.2\times$ fewer parameters than adding trainable blocks across all tested architectures, while trainable blocks improve training only through the classical interpolation mechanism with no quantum-specific benefit.
Reinforcement Learning for Parameterized Quantum State Preparation: A Comparative Study
Feb 18, 2026We extend directed quantum circuit synthesis (DQCS) with reinforcement learning from purely discrete gate selection to parameterized quantum state preparation with continuous single-qubit rotations \(R_x\), \(R_y\), and \(R_z\). We compare two training regimes: a one-stage agent that jointly selects the gate type, the affected qubit(s), and the rotation angle; and a two-stage variant that first proposes a discrete circuit and subsequently optimizes the rotation angles with Adam using parameter-shift gradients. Using Gymnasium and PennyLane, we evaluate Proximal Policy Optimization (PPO) and Advantage Actor--Critic (A2C) on systems comprising two to ten qubits and on targets of increasing complexity with \(λ\) ranging from one to five. Whereas A2C does not learn effective policies in this setting, PPO succeeds under stable hyperparameters (one-stage: learning rate approximately \(5\times10^{-4}\) with a self-fidelity-error threshold of 0.01; two-stage: learning rate approximately \(10^{-4}\)). Both approaches reliably reconstruct computational basis states (between 83\% and 99\% success) and Bell states (between 61\% and 77\% success). However, scalability saturates for \(λ\) of approximately three to four and does not extend to ten-qubit targets even at \(λ=2\). The two-stage method offers only marginal accuracy gains while requiring around three times the runtime. For practicality under a fixed compute budget, we therefore recommend the one-stage PPO policy, provide explicit synthesized circuits, and contrast with a classical variational baseline to outline avenues for improved scalability.
Illustration of Barren Plateaus in Quantum Computing
Feb 18, 2026Variational Quantum Circuits (VQCs) have emerged as a promising paradigm for quantum machine learning in the NISQ era. While parameter sharing in VQCs can reduce the parameter space dimensionality and potentially mitigate the barren plateau phenomenon, it introduces a complex trade-off that has been largely overlooked. This paper investigates how parameter sharing, despite creating better global optima with fewer parameters, fundamentally alters the optimization landscape through deceptive gradients -- regions where gradient information exists but systematically misleads optimizers away from global optima. Through systematic experimental analysis, we demonstrate that increasing degrees of parameter sharing generate more complex solution landscapes with heightened gradient magnitudes and measurably higher deceptiveness ratios. Our findings reveal that traditional gradient-based optimizers (Adam, SGD) show progressively degraded convergence as parameter sharing increases, with performance heavily dependent on hyperparameter selection. We introduce a novel gradient deceptiveness detection algorithm and a quantitative framework for measuring optimization difficulty in quantum circuits, establishing that while parameter sharing can improve circuit expressivity by orders of magnitude, this comes at the cost of significantly increased landscape deceptiveness. These insights provide important considerations for quantum circuit design in practical applications, highlighting the fundamental mismatch between classical optimization strategies and quantum parameter landscapes shaped by parameter sharing.
Quantum Generator Kernels
Jan 30, 2026Quantum kernel methods offer significant theoretical benefits by rendering classically inseparable features separable in quantum space. Yet, the practical application of Quantum Machine Learning (QML), currently constrained by the limitations of Noisy Intermediate-Scale Quantum (NISQ) hardware, necessitates effective strategies to compress and embed large-scale real-world data like images into the constrained capacities of existing quantum devices or simulators. To this end, we propose Quantum Generator Kernels (QGKs), a generator-based approach to quantum kernels, comprising a set of Variational Generator Groups (VGGs) that merge universal generators into a parameterizable operator, ensuring scalable coverage of the available quantum space. Thereby, we address shortcomings of current leading strategies employing hybrid architectures, which might prevent exploiting quantum computing's full potential due to fixed intermediate embedding processes. To optimize the kernel alignment to the target domain, we train a weight vector to parameterize the projection of the VGGs in the current data context. Our empirical results demonstrate superior projection and classification capabilities of the QGK compared to state-of-the-art quantum and classical kernel approaches and show its potential to serve as a versatile framework for various QML applications.
Emergent Cooperation in Quantum Multi-Agent Reinforcement Learning Using Communication
Jan 26, 2026Emergent cooperation in classical Multi-Agent Reinforcement Learning has gained significant attention, particularly in the context of Sequential Social Dilemmas (SSDs). While classical reinforcement learning approaches have demonstrated capability for emergent cooperation, research on extending these methods to Quantum Multi-Agent Reinforcement Learning remains limited, particularly through communication. In this paper, we apply communication approaches to quantum Q-Learning agents: the Mutual Acknowledgment Token Exchange (MATE) protocol, its extension Mutually Endorsed Distributed Incentive Acknowledgment Token Exchange (MEDIATE), the peer rewarding mechanism Gifting, and Reinforced Inter-Agent Learning (RIAL). We evaluate these approaches in three SSDs: the Iterated Prisoner's Dilemma, Iterated Stag Hunt, and Iterated Game of Chicken. Our experimental results show that approaches using MATE with temporal-difference measure (MATE\textsubscript{TD}), AutoMATE, MEDIATE-I, and MEDIATE-S achieved high cooperation levels across all dilemmas, demonstrating that communication is a viable mechanism for fostering emergent cooperation in Quantum Multi-Agent Reinforcement Learning.
Quantum King-Ring Domination in Chess: A QAOA Approach
Jan 01, 2026The Quantum Approximate Optimization Algorithm (QAOA) is extensively benchmarked on synthetic random instances such as MaxCut, TSP, and SAT problems, but these lack semantic structure and human interpretability, offering limited insight into performance on real-world problems with meaningful constraints. We introduce Quantum King-Ring Domination (QKRD), a NISQ-scale benchmark derived from chess tactical positions that provides 5,000 structured instances with one-hot constraints, spatial locality, and 10--40 qubit scale. The benchmark pairs human-interpretable coverage metrics with intrinsic validation against classical heuristics, enabling algorithmic conclusions without external oracles. Using QKRD, we systematically evaluate QAOA design choices and find that constraint-preserving mixers (XY, domain-wall) converge approximately 13 steps faster than standard mixers (p<10^{-7}, d\approx0.5) while eliminating penalty tuning, warm-start strategies reduce convergence by 45 steps (p<10^{-127}, d=3.35) with energy improvements exceeding d=8, and Conditional Value-at-Risk (CVaR) optimization yields an informative negative result with worse energy (p<10^{-40}, d=1.21) and no coverage benefit. Intrinsic validation shows QAOA outperforms greedy heuristics by 12.6\% and random selection by 80.1\%. Our results demonstrate that structured benchmarks reveal advantages of problem-informed QAOA techniques obscured in random instances. We release all code, data, and experimental artifacts for reproducible NISQ algorithm research.
Topology-Guided Quantum GANs for Constrained Graph Generation
Dec 11, 2025Quantum computing (QC) promises theoretical advantages, benefiting computational problems that would not be efficiently classically simulatable. However, much of this theoretical speedup depends on the quantum circuit design solving the problem. We argue that QC literature has yet to explore more domain specific ansatz-topologies, instead of relying on generic, one-size-fits-all architectures. In this work, we show that incorporating task-specific inductive biases -- specifically geometric priors -- into quantum circuit design can enhance the performance of hybrid Quantum Generative Adversarial Networks (QuGANs) on the task of generating geometrically constrained K4 graphs. We evaluate a portfolio of entanglement topologies and loss-function designs to assess their impact on both statistical fidelity and compliance with geometric constraints, including the Triangle and Ptolemaic inequalities. Our results show that aligning circuit topology with the underlying problem structure yields substantial benefits: the Triangle-topology QuGAN achieves the highest geometric validity among quantum models and matches the performance of classical Generative Adversarial Networks (GAN). Additionally, we showcase how specific architectural choices, such as entangling gate types, variance regularization and output-scaling govern the trade-off between geometric consistency and distributional accuracy, thus emphasizing the value of structured, task-aware quantum ansatz-topologies.
Quantum Boltzmann Machines using Parallel Annealing for Medical Image Classification
Jul 18, 2025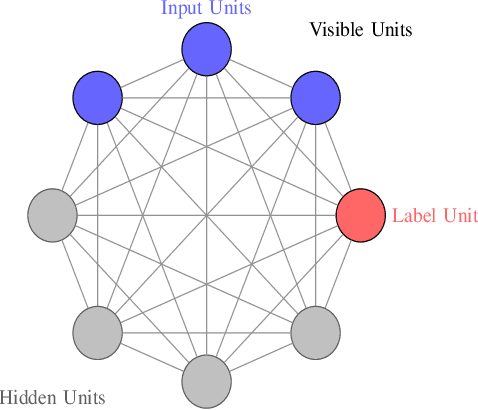
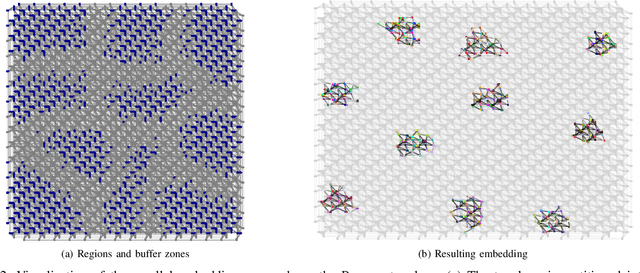
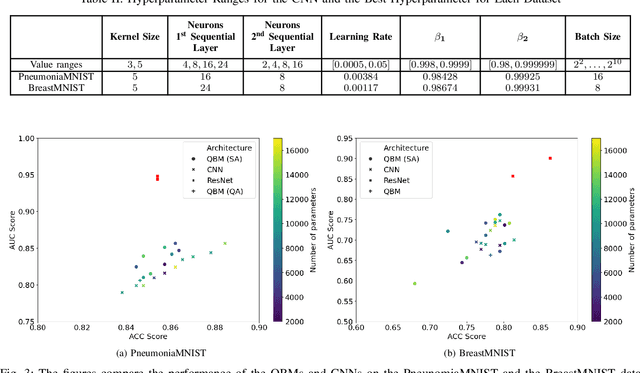
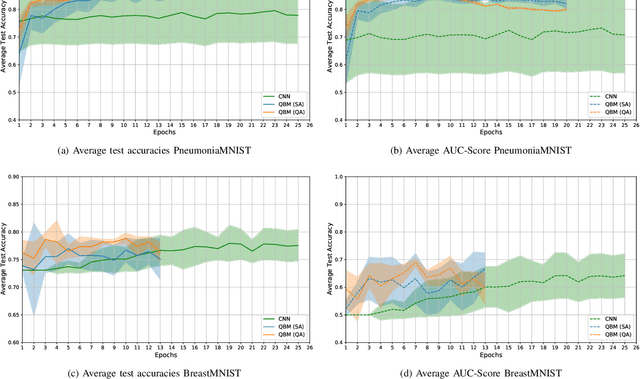
Exploiting the fact that samples drawn from a quantum annealer inherently follow a Boltzmann-like distribution, annealing-based Quantum Boltzmann Machines (QBMs) have gained increasing popularity in the quantum research community. While they harbor great promises for quantum speed-up, their usage currently stays a costly endeavor, as large amounts of QPU time are required to train them. This limits their applicability in the NISQ era. Following the idea of No\`e et al. (2024), who tried to alleviate this cost by incorporating parallel quantum annealing into their unsupervised training of QBMs, this paper presents an improved version of parallel quantum annealing that we employ to train QBMs in a supervised setting. Saving qubits to encode the inputs, the latter setting allows us to test our approach on medical images from the MedMNIST data set (Yang et al., 2023), thereby moving closer to real-world applicability of the technology. Our experiments show that QBMs using our approach already achieve reasonable results, comparable to those of similarly-sized Convolutional Neural Networks (CNNs), with markedly smaller numbers of epochs than these classical models. Our parallel annealing technique leads to a speed-up of almost 70 % compared to regular annealing-based BM executions.
Surrogate Fitness Metrics for Interpretable Reinforcement Learning
Apr 20, 2025We employ an evolutionary optimization framework that perturbs initial states to generate informative and diverse policy demonstrations. A joint surrogate fitness function guides the optimization by combining local diversity, behavioral certainty, and global population diversity. To assess demonstration quality, we apply a set of evaluation metrics, including the reward-based optimality gap, fidelity interquartile means (IQMs), fitness composition analysis, and trajectory visualizations. Hyperparameter sensitivity is also examined to better understand the dynamics of trajectory optimization. Our findings demonstrate that optimizing trajectory selection via surrogate fitness metrics significantly improves interpretability of RL policies in both discrete and continuous environments. In gridworld domains, evaluations reveal significantly enhanced demonstration fidelities compared to random and ablated baselines. In continuous control, the proposed framework offers valuable insights, particularly for early-stage policies, while fidelity-based optimization proves more effective for mature policies. By refining and systematically analyzing surrogate fitness functions, this study advances the interpretability of RL models. The proposed improvements provide deeper insights into RL decision-making, benefiting applications in safety-critical and explainability-focused domains.
Evaluating Parameter-Based Training Performance of Neural Networks and Variational Quantum Circuits
Apr 09, 2025



In recent years, neural networks (NNs) have driven significant advances in machine learning. However, as tasks grow more complex, NNs often require large numbers of trainable parameters, which increases computational and energy demands. Variational quantum circuits (VQCs) offer a promising alternative: they leverage quantum mechanics to capture intricate relationships and typically need fewer parameters. In this work, we evaluate NNs and VQCs on simple supervised and reinforcement learning tasks, examining models with different parameter sizes. We simulate VQCs and execute selected parts of the training process on real quantum hardware to approximate actual training times. Our results show that VQCs can match NNs in performance while using significantly fewer parameters, despite longer training durations. As quantum technology and algorithms advance, and VQC architectures improve, we posit that VQCs could become advantageous for certain machine learning tasks.