 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePuTR: A Pure Transformer for Decoupled and Online Multi-Object Tracking
May 23, 2024



Recent advances in Multi-Object Tracking (MOT) have achieved remarkable success in short-term association within the decoupled tracking-by-detection online paradigm. However, long-term tracking still remains a challenging task. Although graph-based approaches can address this issue by modeling trajectories as a graph in the decoupled manner, their non-online nature poses obstacles for real-time applications. In this paper, we demonstrate that the trajectory graph is a directed acyclic graph, which can be represented by an object sequence arranged by frame and a binary adjacency matrix. It is a coincidence that the binary matrix matches the attention mask in the Transformer, and the object sequence serves exactly as a natural input sequence. Intuitively, we propose that a pure Transformer can naturally unify short- and long-term associations in a decoupled and online manner. Our experiments show that a classic Transformer architecture naturally suits the association problem and achieves a strong baseline compared to existing foundational methods across four datasets: DanceTrack, SportsMOT, MOT17, and MOT20, as well as superior generalizability in domain shift. Moreover, the decoupled property also enables efficient training and inference. This work pioneers a promising Transformer-based approach for the MOT task, and provides code to facilitate further research. https://github.com/chongweiliu/PuTR
Deep Contrastive One-Class Time Series Anomaly Detection
Jul 04, 2022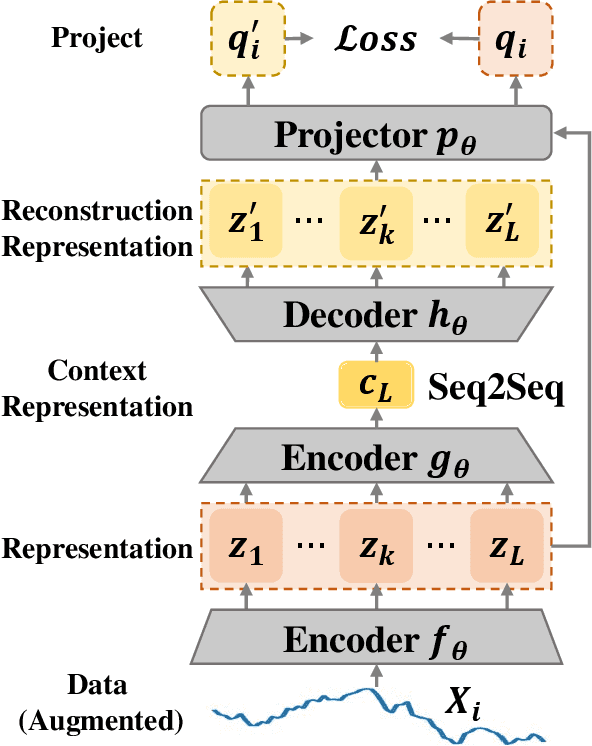



The accumulation of time series data and the absence of labels make time-series Anomaly Detection (AD) a self-supervised deep learning task. Single-assumption-based methods may only touch on a certain aspect of the whole normality, not sufficient to detect various anomalies. Among them, contrastive learning methods adopted for AD always choose negative pairs that are both normal to push away, which is objecting to AD tasks' purpose. Existing multi-assumption-based methods are usually two-staged, firstly applying a pre-training process whose target may differ from AD, so the performance is limited by the pre-trained representations. This paper proposes a deep Contrastive One-Class Anomaly detection method of time series (COCA), which combines the normality assumptions of contrastive learning and one-class classification. The key idea is to treat the representation and reconstructed representation as the positive pair of negative-samples-free contrastive learning, and we name it sequence contrast. Then we apply a contrastive one-class loss function composed of invariance and variance terms, the former optimizing loss of the two assumptions simultaneously, and the latter preventing hypersphere collapse. Extensive experiments conducted on four real-world time-series datasets show the superior performance of the proposed method achieves state-of-the-art. The code is publicly available at https://github.com/ruiking04/COCA.
A Dataset And Benchmark Of Underwater Object Detection For Robot Picking
Jun 10, 2021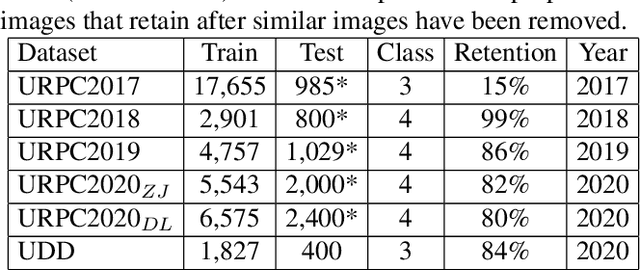
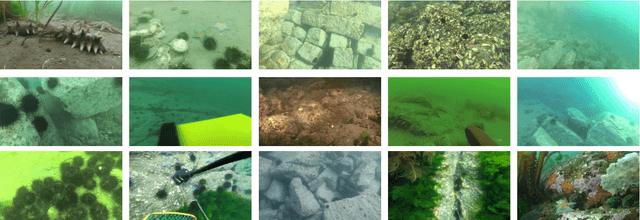
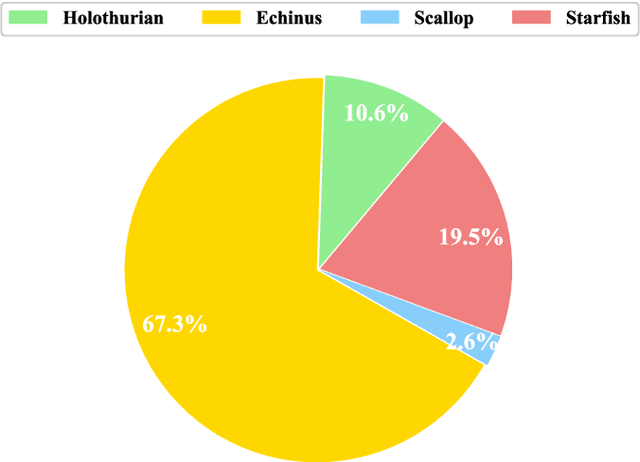
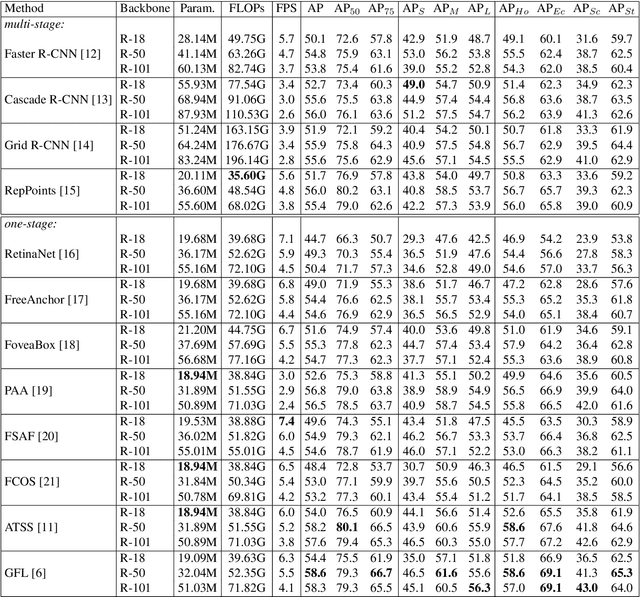
Underwater object detection for robot picking has attracted a lot of interest. However, it is still an unsolved problem due to several challenges. We take steps towards making it more realistic by addressing the following challenges. Firstly, the currently available datasets basically lack the test set annotations, causing researchers must compare their method with other SOTAs on a self-divided test set (from the training set). Training other methods lead to an increase in workload and different researchers divide different datasets, resulting there is no unified benchmark to compare the performance of different algorithms. Secondly, these datasets also have other shortcomings, e.g., too many similar images or incomplete labels. Towards these challenges we introduce a dataset, Detecting Underwater Objects (DUO), and a corresponding benchmark, based on the collection and re-annotation of all relevant datasets. DUO contains a collection of diverse underwater images with more rational annotations. The corresponding benchmark provides indicators of both efficiency and accuracy of SOTAs (under the MMDtection framework) for academic research and industrial applications, where JETSON AGX XAVIER is used to assess detector speed to simulate the robot-embedded environment.
UDD: An Underwater Open-sea Farm Object Detection Dataset for Underwater Robot Picking
Mar 03, 2020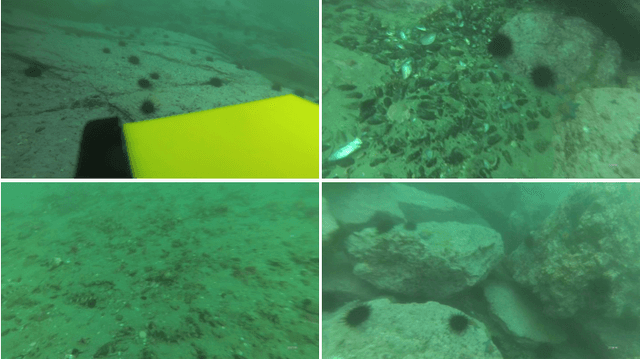
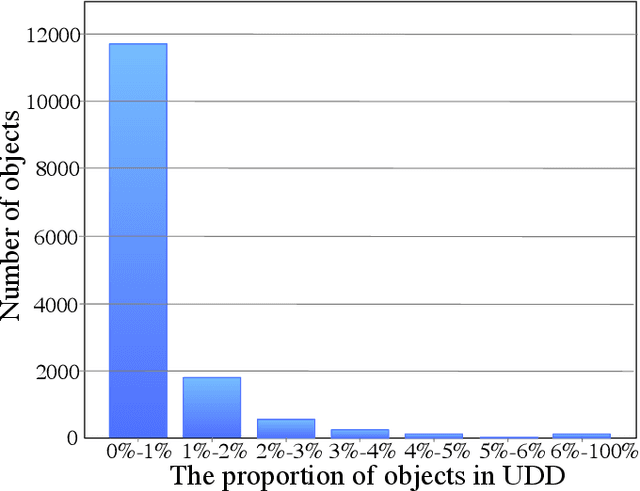
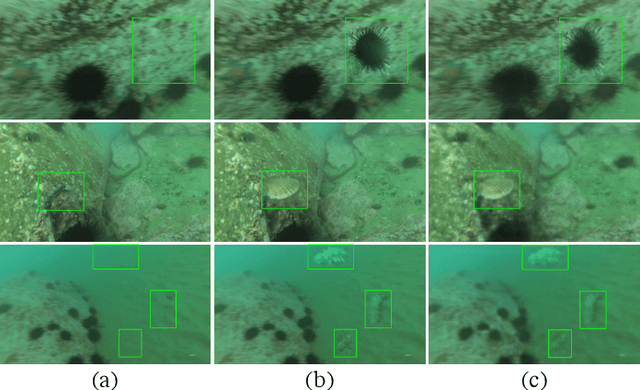
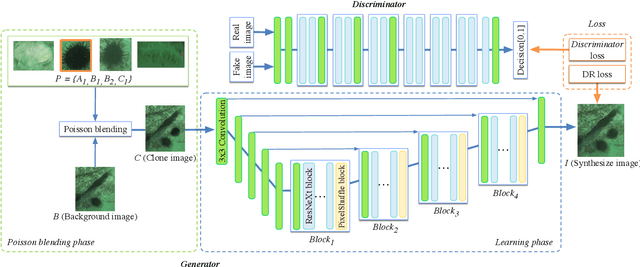
To promote the development of underwater robot picking in sea farms, we propose an underwater open-sea farm object detection dataset called UDD. Concretely, UDD consists of 3 categories (seacucumber, seaurchin, and scallop) with 2227 images. To the best of our knowledge, it's the first dataset collected in a real open-sea farm for underwater robot picking and we also propose a novel Poisson-blending-embedded Generative Adversarial Network (Poisson GAN) to overcome the class-imbalance and massive small objects issues in UDD. By utilizing Poisson GAN to change the number, position, even size of objects in UDD, we construct a large scale augmented dataset (AUDD) containing 18K images. Besides, in order to make the detector better adapted to the underwater picking environment, a dataset (Pre-trained dataset) for pre-training containing 590K images is also proposed. Finally, we design a lightweight network (UnderwaterNet) to address the problems that detecting small objects from cloudy underwater pictures and meeting the efficiency requirements in robots. Specifically, we design a depth-wise-convolution-based Multi-scale Contextual Features Fusion (MFF) block and a Multi-scale Blursampling (MBP) module to reduce the parameters of the network to 1.3M at 48FPS, without any loss on accuracy. Extensive experiments verify the effectiveness of the proposed UnderwaterNet, Poisson GAN, UDD, AUDD, and Pre-trained datasets.