 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHCNet: Hierarchical Context Network for Semantic Segmentation
Oct 20, 2020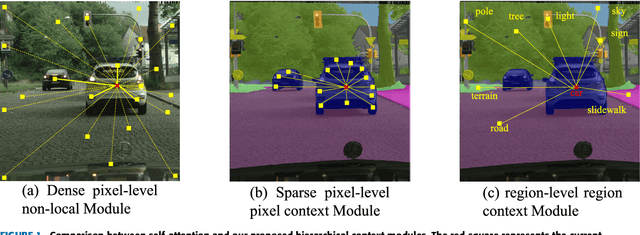


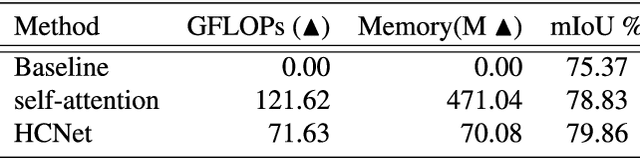
Global context information is vital in visual understanding problems, especially in pixel-level semantic segmentation. The mainstream methods adopt the self-attention mechanism to model global context information. However, pixels belonging to different classes usually have weak feature correlation. Modeling the global pixel-level correlation matrix indiscriminately is extremely redundant in the self-attention mechanism. In order to solve the above problem, we propose a hierarchical context network to differentially model homogeneous pixels with strong correlations and heterogeneous pixels with weak correlations. Specifically, we first propose a multi-scale guided pre-segmentation module to divide the entire feature map into different classed-based homogeneous regions. Within each homogeneous region, we design the pixel context module to capture pixel-level correlations. Subsequently, different from the self-attention mechanism that still models weak heterogeneous correlations in a dense pixel-level manner, the region context module is proposed to model sparse region-level dependencies using a unified representation of each region. Through aggregating fine-grained pixel context features and coarse-grained region context features, our proposed network can not only hierarchically model global context information but also harvest multi-granularity representations to more robustly identify multi-scale objects. We evaluate our approach on Cityscapes and the ISPRS Vaihingen dataset. Without Bells or Whistles, our approach realizes a mean IoU of 82.8% and overall accuracy of 91.4% on Cityscapes and ISPRS Vaihingen test set, achieving state-of-the-art results.
UDD: An Underwater Open-sea Farm Object Detection Dataset for Underwater Robot Picking
Mar 03, 2020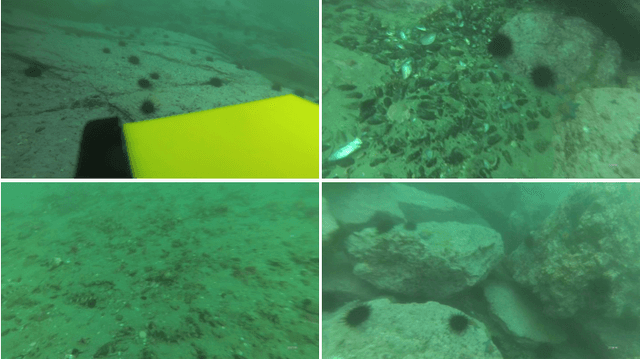
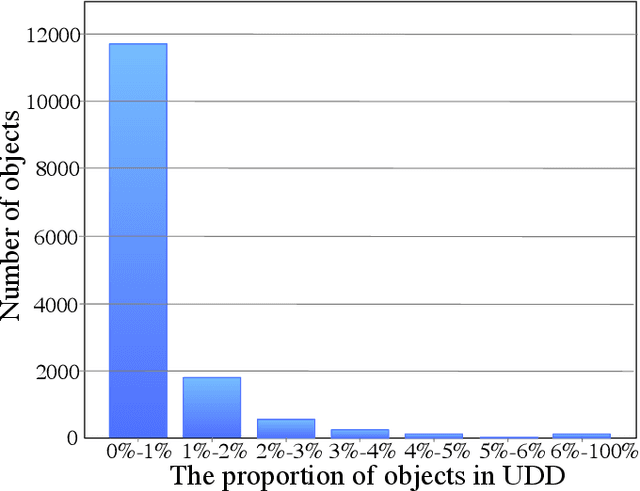
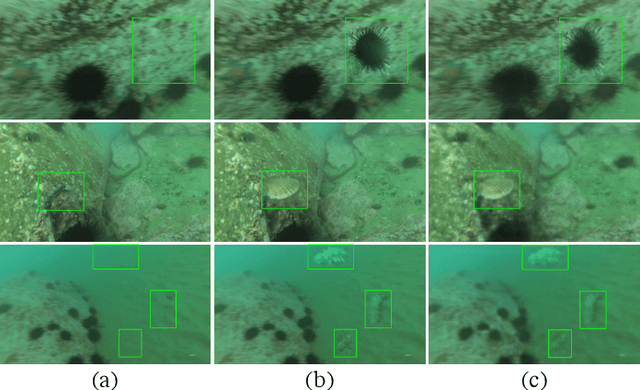
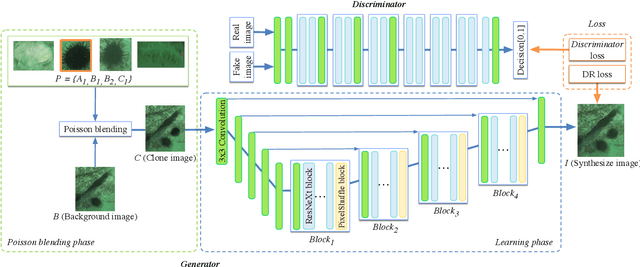
To promote the development of underwater robot picking in sea farms, we propose an underwater open-sea farm object detection dataset called UDD. Concretely, UDD consists of 3 categories (seacucumber, seaurchin, and scallop) with 2227 images. To the best of our knowledge, it's the first dataset collected in a real open-sea farm for underwater robot picking and we also propose a novel Poisson-blending-embedded Generative Adversarial Network (Poisson GAN) to overcome the class-imbalance and massive small objects issues in UDD. By utilizing Poisson GAN to change the number, position, even size of objects in UDD, we construct a large scale augmented dataset (AUDD) containing 18K images. Besides, in order to make the detector better adapted to the underwater picking environment, a dataset (Pre-trained dataset) for pre-training containing 590K images is also proposed. Finally, we design a lightweight network (UnderwaterNet) to address the problems that detecting small objects from cloudy underwater pictures and meeting the efficiency requirements in robots. Specifically, we design a depth-wise-convolution-based Multi-scale Contextual Features Fusion (MFF) block and a Multi-scale Blursampling (MBP) module to reduce the parameters of the network to 1.3M at 48FPS, without any loss on accuracy. Extensive experiments verify the effectiveness of the proposed UnderwaterNet, Poisson GAN, UDD, AUDD, and Pre-trained datasets.