 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUDD: An Underwater Open-sea Farm Object Detection Dataset for Underwater Robot Picking
Paper and Code
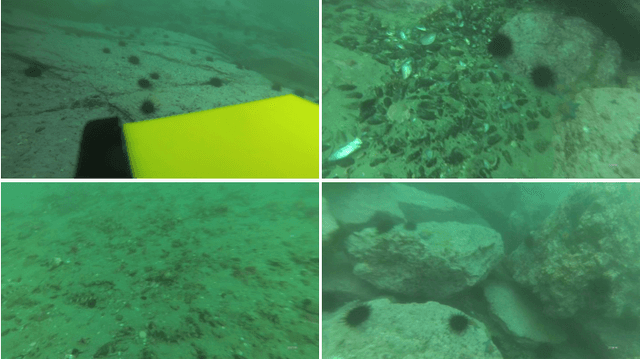
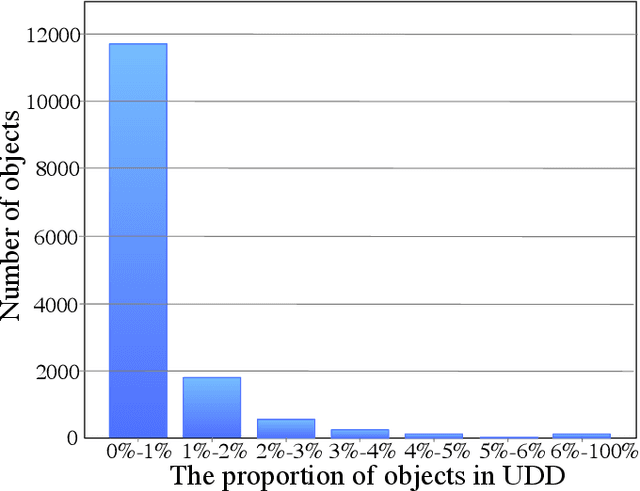
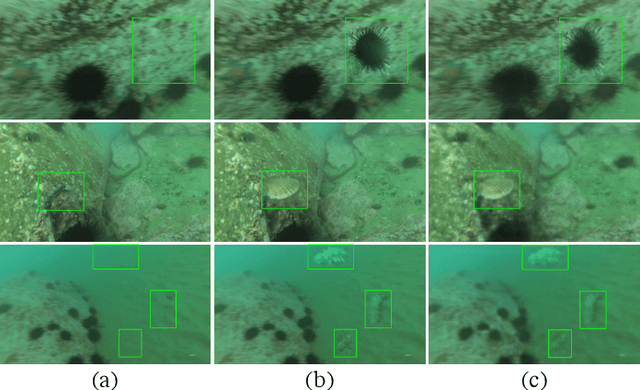
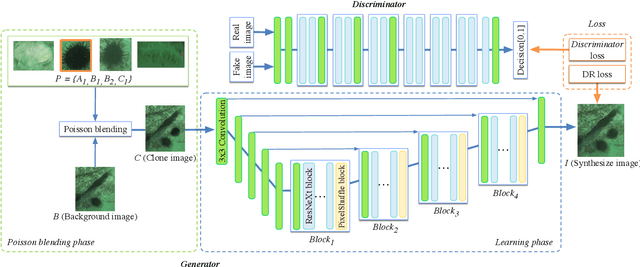
To promote the development of underwater robot picking in sea farms, we propose an underwater open-sea farm object detection dataset called UDD. Concretely, UDD consists of 3 categories (seacucumber, seaurchin, and scallop) with 2227 images. To the best of our knowledge, it's the first dataset collected in a real open-sea farm for underwater robot picking and we also propose a novel Poisson-blending-embedded Generative Adversarial Network (Poisson GAN) to overcome the class-imbalance and massive small objects issues in UDD. By utilizing Poisson GAN to change the number, position, even size of objects in UDD, we construct a large scale augmented dataset (AUDD) containing 18K images. Besides, in order to make the detector better adapted to the underwater picking environment, a dataset (Pre-trained dataset) for pre-training containing 590K images is also proposed. Finally, we design a lightweight network (UnderwaterNet) to address the problems that detecting small objects from cloudy underwater pictures and meeting the efficiency requirements in robots. Specifically, we design a depth-wise-convolution-based Multi-scale Contextual Features Fusion (MFF) block and a Multi-scale Blursampling (MBP) module to reduce the parameters of the network to 1.3M at 48FPS, without any loss on accuracy. Extensive experiments verify the effectiveness of the proposed UnderwaterNet, Poisson GAN, UDD, AUDD, and Pre-trained datasets.