 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA multi-centre, multi-device benchmark dataset for landmark-based comprehensive fetal biometry
Dec 19, 2025Accurate fetal growth assessment from ultrasound (US) relies on precise biometry measured by manually identifying anatomical landmarks in standard planes. Manual landmarking is time-consuming, operator-dependent, and sensitive to variability across scanners and sites, limiting the reproducibility of automated approaches. There is a need for multi-source annotated datasets to develop artificial intelligence-assisted fetal growth assessment methods. To address this bottleneck, we present an open, multi-centre, multi-device benchmark dataset of fetal US images with expert anatomical landmark annotations for clinically used fetal biometric measurements. These measurements include head bi-parietal and occipito-frontal diameters, abdominal transverse and antero-posterior diameters, and femoral length. The dataset comprises 4,513 de-identified US images from 1,904 subjects acquired at three clinical sites using seven different US devices. We provide standardised, subject-disjoint train/test splits, evaluation code, and baseline results to enable fair and reproducible comparison of methods. Using an automatic biometry model, we quantify domain shift and demonstrate that training and evaluation confined to a single centre substantially overestimate performance relative to multi-centre testing. To the best of our knowledge, this is the first publicly available multi-centre, multi-device, landmark-annotated dataset that covers all primary fetal biometry measures, providing a robust benchmark for domain adaptation and multi-centre generalisation in fetal biometry and enabling more reliable AI-assisted fetal growth assessment across centres. All data, annotations, training code, and evaluation pipelines are made publicly available.
Robotic Arm Platform for Multi-View Image Acquisition and 3D Reconstruction in Minimally Invasive Surgery
Oct 15, 2024Minimally invasive surgery (MIS) offers significant benefits such as reduced recovery time and minimised patient trauma, but poses challenges in visibility and access, making accurate 3D reconstruction a significant tool in surgical planning and navigation. This work introduces a robotic arm platform for efficient multi-view image acquisition and precise 3D reconstruction in MIS settings. We adapted a laparoscope to a robotic arm and captured ex-vivo images of several ovine organs across varying lighting conditions (operating room and laparoscopic) and trajectories (spherical and laparoscopic). We employed recently released learning-based feature matchers combined with COLMAP to produce our reconstructions. The reconstructions were evaluated against high-precision laser scans for quantitative evaluation. Our results show that whilst reconstructions suffer most under realistic MIS lighting and trajectory, many versions of our pipeline achieve close to sub-millimetre accuracy with an average of 1.05 mm Root Mean Squared Error and 0.82 mm Chamfer distance. Our best reconstruction results occur with operating room lighting and spherical trajectories. Our robotic platform provides a tool for controlled, repeatable multi-view data acquisition for 3D generation in MIS environments which we hope leads to new datasets for training learning-based models.
Mismatched: Evaluating the Limits of Image Matching Approaches and Benchmarks
Aug 29, 2024



Three-dimensional (3D) reconstruction from two-dimensional images is an active research field in computer vision, with applications ranging from navigation and object tracking to segmentation and three-dimensional modeling. Traditionally, parametric techniques have been employed for this task. However, recent advancements have seen a shift towards learning-based methods. Given the rapid pace of research and the frequent introduction of new image matching methods, it is essential to evaluate them. In this paper, we present a comprehensive evaluation of various image matching methods using a structure-from-motion pipeline. We assess the performance of these methods on both in-domain and out-of-domain datasets, identifying key limitations in both the methods and benchmarks. We also investigate the impact of edge detection as a pre-processing step. Our analysis reveals that image matching for 3D reconstruction remains an open challenge, necessitating careful selection and tuning of models for specific scenarios, while also highlighting mismatches in how metrics currently represent method performance.
Measuring proximity to standard planes during fetal brain ultrasound scanning
Apr 10, 2024



This paper introduces a novel pipeline designed to bring ultrasound (US) plane pose estimation closer to clinical use for more effective navigation to the standard planes (SPs) in the fetal brain. We propose a semi-supervised segmentation model utilizing both labeled SPs and unlabeled 3D US volume slices. Our model enables reliable segmentation across a diverse set of fetal brain images. Furthermore, the model incorporates a classification mechanism to identify the fetal brain precisely. Our model not only filters out frames lacking the brain but also generates masks for those containing it, enhancing the relevance of plane pose regression in clinical settings. We focus on fetal brain navigation from 2D ultrasound (US) video analysis and combine this model with a US plane pose regression network to provide sensorless proximity detection to SPs and non-SPs planes; we emphasize the importance of proximity detection to SPs for guiding sonographers, offering a substantial advantage over traditional methods by allowing earlier and more precise adjustments during scanning. We demonstrate the practical applicability of our approach through validation on real fetal scan videos obtained from sonographers of varying expertise levels. Our findings demonstrate the potential of our approach to complement existing fetal US technologies and advance prenatal diagnostic practices.
Learning ultrasound plane pose regression: assessing generalized pose coordinates in the fetal brain
Jan 19, 2023



In obstetric ultrasound (US) scanning, the learner's ability to mentally build a three-dimensional (3D) map of the fetus from a two-dimensional (2D) US image represents a significant challenge in skill acquisition. We aim to build a US plane localization system for 3D visualization, training, and guidance without integrating additional sensors. This work builds on top of our previous work, which predicts the six-dimensional (6D) pose of arbitrarily-oriented US planes slicing the fetal brain with respect to a normalized reference frame using a convolutional neural network (CNN) regression network. Here, we analyze in detail the assumptions of the normalized fetal brain reference frame and quantify its accuracy with respect to the acquisition of transventricular (TV) standard plane (SP) for fetal biometry. We investigate the impact of registration quality in the training and testing data and its subsequent effect on trained models. Finally, we introduce data augmentations and larger training sets that improve the results of our previous work, achieving median errors of 3.53 mm and 6.42 degrees for translation and rotation, respectively.
Position-based Dynamics Simulator of Brain Deformations for Path Planning and Intra-Operative Control in Keyhole Neurosurgery
Jun 18, 2021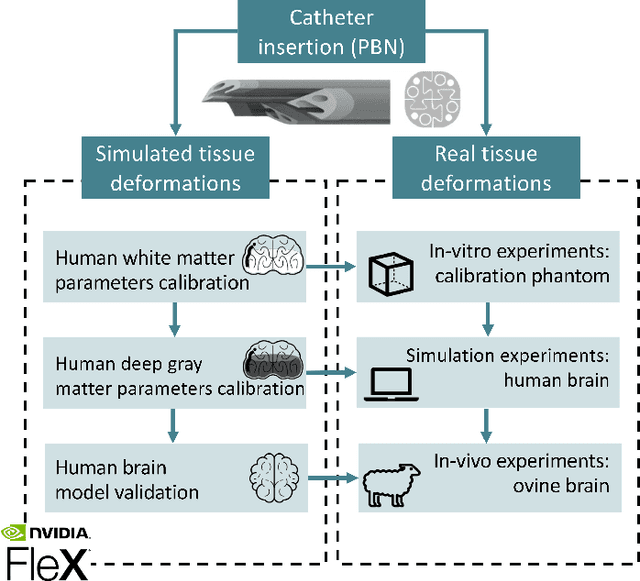
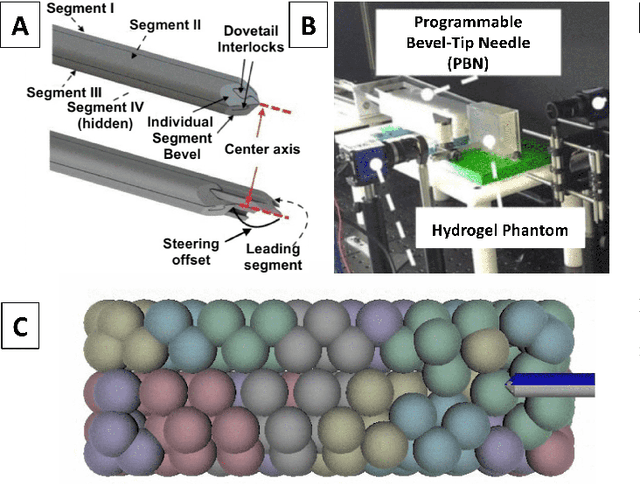
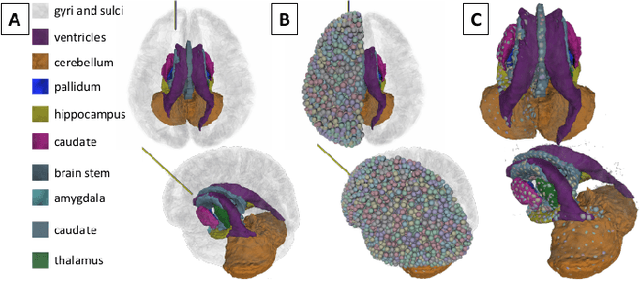

Many tasks in robot-assisted surgery require planning and controlling manipulators' motions that interact with highly deformable objects. This study proposes a realistic, time-bounded simulator based on Position-based Dynamics (PBD) simulation that mocks brain deformations due to catheter insertion for pre-operative path planning and intra-operative guidance in keyhole surgical procedures. It maximizes the probability of success by accounting for uncertainty in deformation models, noisy sensing, and unpredictable actuation. The PBD deformation parameters were initialized on a parallelepiped-shaped simulated phantom to obtain a reasonable starting guess for the brain white matter. They were calibrated by comparing the obtained displacements with deformation data for catheter insertion in a composite hydrogel phantom. Knowing the gray matter brain structures' different behaviors, the parameters were fine-tuned to obtain a generalized human brain model. The brain structures' average displacement was compared with values in the literature. The simulator's numerical model uses a novel approach with respect to the literature, and it has proved to be a close match with real brain deformations through validation using recorded deformation data of in-vivo animal trials with a mean mismatch of 4.73$\pm$2.15%. The stability, accuracy, and real-time performance make this model suitable for creating a dynamic environment for KN path planning, pre-operative path planning, and intra-operative guidance.