 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Arm Platform for Multi-View Image Acquisition and 3D Reconstruction in Minimally Invasive Surgery
Oct 15, 2024Minimally invasive surgery (MIS) offers significant benefits such as reduced recovery time and minimised patient trauma, but poses challenges in visibility and access, making accurate 3D reconstruction a significant tool in surgical planning and navigation. This work introduces a robotic arm platform for efficient multi-view image acquisition and precise 3D reconstruction in MIS settings. We adapted a laparoscope to a robotic arm and captured ex-vivo images of several ovine organs across varying lighting conditions (operating room and laparoscopic) and trajectories (spherical and laparoscopic). We employed recently released learning-based feature matchers combined with COLMAP to produce our reconstructions. The reconstructions were evaluated against high-precision laser scans for quantitative evaluation. Our results show that whilst reconstructions suffer most under realistic MIS lighting and trajectory, many versions of our pipeline achieve close to sub-millimetre accuracy with an average of 1.05 mm Root Mean Squared Error and 0.82 mm Chamfer distance. Our best reconstruction results occur with operating room lighting and spherical trajectories. Our robotic platform provides a tool for controlled, repeatable multi-view data acquisition for 3D generation in MIS environments which we hope leads to new datasets for training learning-based models.
Mismatched: Evaluating the Limits of Image Matching Approaches and Benchmarks
Aug 29, 2024



Three-dimensional (3D) reconstruction from two-dimensional images is an active research field in computer vision, with applications ranging from navigation and object tracking to segmentation and three-dimensional modeling. Traditionally, parametric techniques have been employed for this task. However, recent advancements have seen a shift towards learning-based methods. Given the rapid pace of research and the frequent introduction of new image matching methods, it is essential to evaluate them. In this paper, we present a comprehensive evaluation of various image matching methods using a structure-from-motion pipeline. We assess the performance of these methods on both in-domain and out-of-domain datasets, identifying key limitations in both the methods and benchmarks. We also investigate the impact of edge detection as a pre-processing step. Our analysis reveals that image matching for 3D reconstruction remains an open challenge, necessitating careful selection and tuning of models for specific scenarios, while also highlighting mismatches in how metrics currently represent method performance.
Gaussian Pancakes: Geometrically-Regularized 3D Gaussian Splatting for Realistic Endoscopic Reconstruction
Apr 09, 2024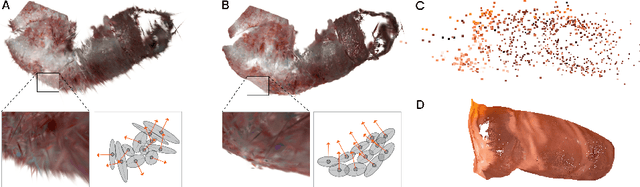
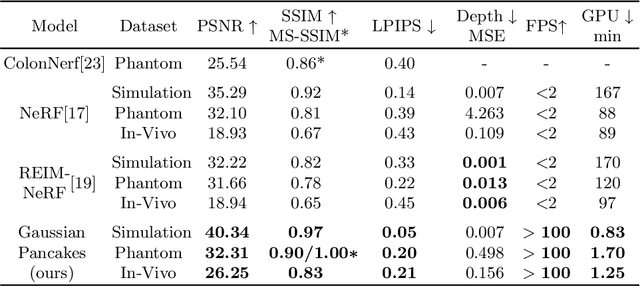
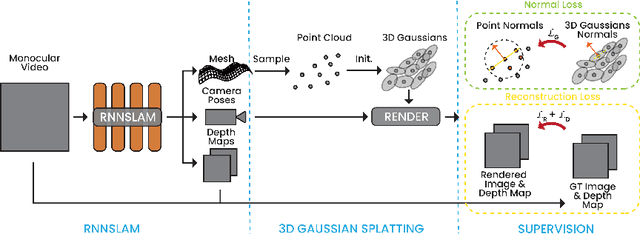
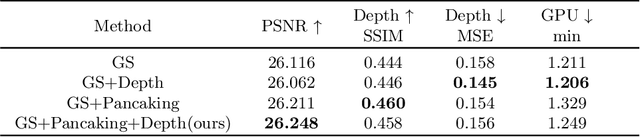
Within colorectal cancer diagnostics, conventional colonoscopy techniques face critical limitations, including a limited field of view and a lack of depth information, which can impede the detection of precancerous lesions. Current methods struggle to provide comprehensive and accurate 3D reconstructions of the colonic surface which can help minimize the missing regions and reinspection for pre-cancerous polyps. Addressing this, we introduce 'Gaussian Pancakes', a method that leverages 3D Gaussian Splatting (3D GS) combined with a Recurrent Neural Network-based Simultaneous Localization and Mapping (RNNSLAM) system. By introducing geometric and depth regularization into the 3D GS framework, our approach ensures more accurate alignment of Gaussians with the colon surface, resulting in smoother 3D reconstructions with novel viewing of detailed textures and structures. Evaluations across three diverse datasets show that Gaussian Pancakes enhances novel view synthesis quality, surpassing current leading methods with a 18% boost in PSNR and a 16% improvement in SSIM. It also delivers over 100X faster rendering and more than 10X shorter training times, making it a practical tool for real-time applications. Hence, this holds promise for achieving clinical translation for better detection and diagnosis of colorectal cancer.