 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards a Procedure Optimised Steerable Microcatheter for Deep Seated Neurosurgery
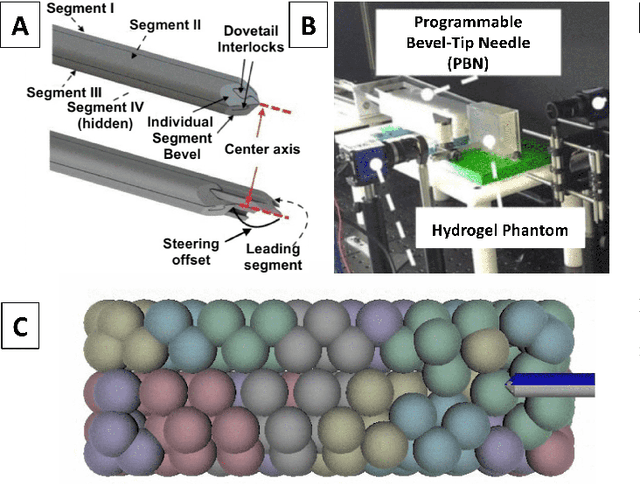
Mar 03, 2023In recent years, the steerable needles have attracted significant interest in Minimally Invasive Surgery (MIS). Amongst these, the flexible Programmable-bevel tip needle (PBN) concept has successfully achieved an in-vivo demonstration to evaluate the feasibility of Convection Enhanced Delivery (CED) of chemotherapeutics within the ovine model, with a 2.5 mm PBN prototype. However, further size reduction is necessary for other diagnostic and therapeutic procedures involving deep-seated tissue structures. Since PBNs have a complex cross-section geometry, standard production methods, such as extrusion, fails as the outer diameter is reduced further. This paper presents our first attempt to demonstrate a new manufacturing method for the PBN that employs thermal drawing technology. Experimental characterisation tests were performed for the 2.5 mm PBN and a new 1.3 mm Thermally Drawn (TD) PBN prototype described here. The results show that thermal drawing presents a significant advantage in miniaturising complex needle structures. However, the steering behaviour is affected due to the choice of material in this first attempt, a limitation which will be addressed in future work.
Position-based Dynamics Simulator of Brain Deformations for Path Planning and Intra-Operative Control in Keyhole Neurosurgery
Jun 18, 2021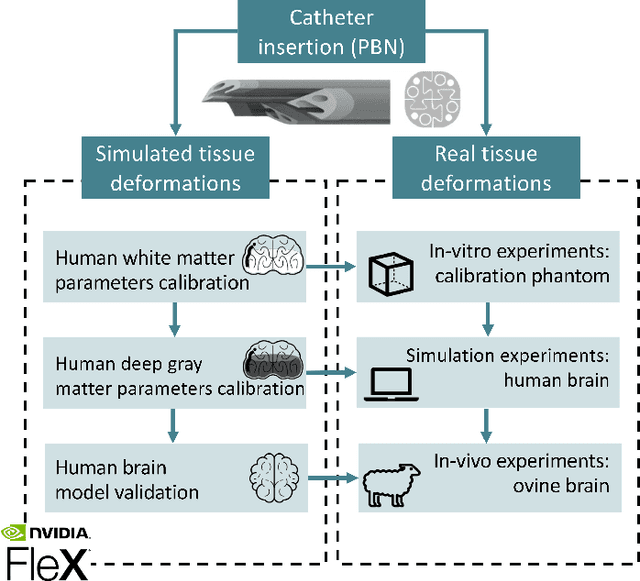
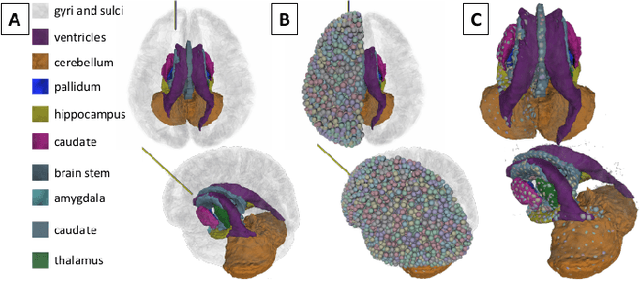

Many tasks in robot-assisted surgery require planning and controlling manipulators' motions that interact with highly deformable objects. This study proposes a realistic, time-bounded simulator based on Position-based Dynamics (PBD) simulation that mocks brain deformations due to catheter insertion for pre-operative path planning and intra-operative guidance in keyhole surgical procedures. It maximizes the probability of success by accounting for uncertainty in deformation models, noisy sensing, and unpredictable actuation. The PBD deformation parameters were initialized on a parallelepiped-shaped simulated phantom to obtain a reasonable starting guess for the brain white matter. They were calibrated by comparing the obtained displacements with deformation data for catheter insertion in a composite hydrogel phantom. Knowing the gray matter brain structures' different behaviors, the parameters were fine-tuned to obtain a generalized human brain model. The brain structures' average displacement was compared with values in the literature. The simulator's numerical model uses a novel approach with respect to the literature, and it has proved to be a close match with real brain deformations through validation using recorded deformation data of in-vivo animal trials with a mean mismatch of 4.73$\pm$2.15%. The stability, accuracy, and real-time performance make this model suitable for creating a dynamic environment for KN path planning, pre-operative path planning, and intra-operative guidance.