 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Addendum to NeBula: Towards Extending TEAM CoSTAR's Solution to Larger Scale Environments
Apr 18, 2025This paper presents an appendix to the original NeBula autonomy solution developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), participating in the DARPA Subterranean Challenge. Specifically, this paper presents extensions to NeBula's hardware, software, and algorithmic components that focus on increasing the range and scale of the exploration environment. From the algorithmic perspective, we discuss the following extensions to the original NeBula framework: (i) large-scale geometric and semantic environment mapping; (ii) an adaptive positioning system; (iii) probabilistic traversability analysis and local planning; (iv) large-scale POMDP-based global motion planning and exploration behavior; (v) large-scale networking and decentralized reasoning; (vi) communication-aware mission planning; and (vii) multi-modal ground-aerial exploration solutions. We demonstrate the application and deployment of the presented systems and solutions in various large-scale underground environments, including limestone mine exploration scenarios as well as deployment in the DARPA Subterranean challenge.
Panopticus: Omnidirectional 3D Object Detection on Resource-constrained Edge Devices
Oct 02, 2024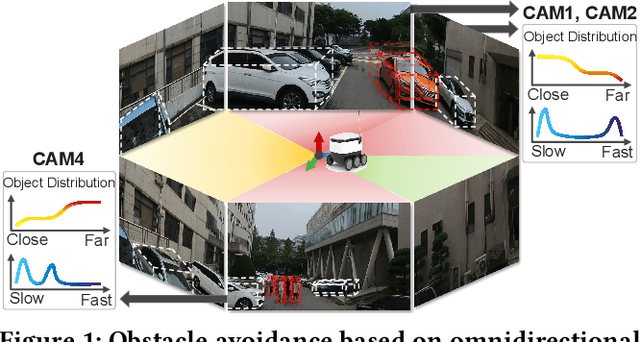
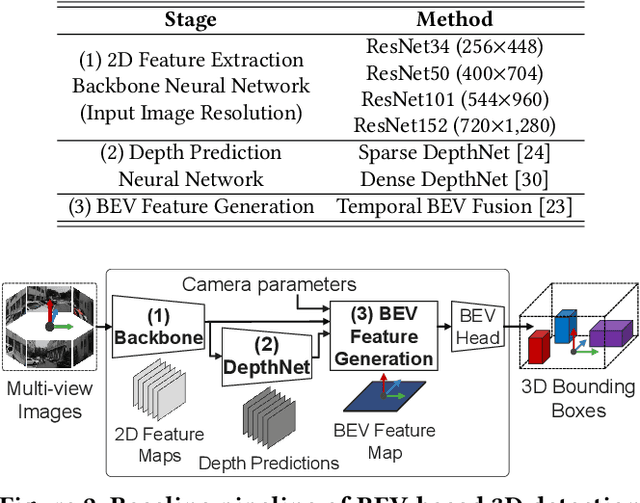
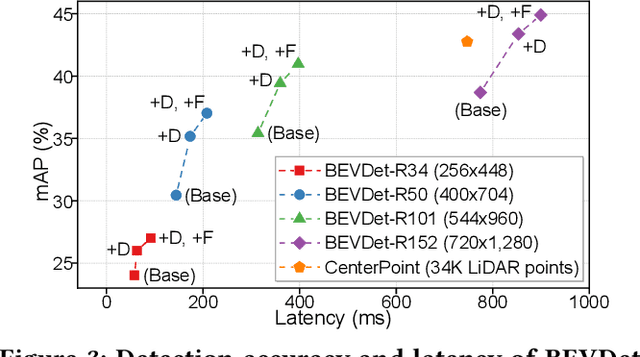
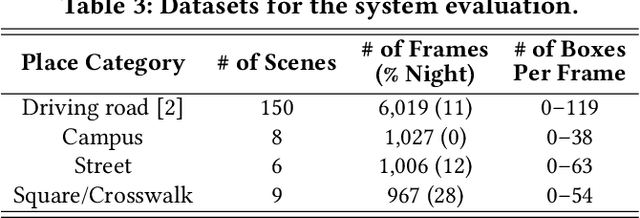
3D object detection with omnidirectional views enables safety-critical applications such as mobile robot navigation. Such applications increasingly operate on resource-constrained edge devices, facilitating reliable processing without privacy concerns or network delays. To enable cost-effective deployment, cameras have been widely adopted as a low-cost alternative to LiDAR sensors. However, the compute-intensive workload to achieve high performance of camera-based solutions remains challenging due to the computational limitations of edge devices. In this paper, we present Panopticus, a carefully designed system for omnidirectional and camera-based 3D detection on edge devices. Panopticus employs an adaptive multi-branch detection scheme that accounts for spatial complexities. To optimize the accuracy within latency limits, Panopticus dynamically adjusts the model's architecture and operations based on available edge resources and spatial characteristics. We implemented Panopticus on three edge devices and conducted experiments across real-world environments based on the public self-driving dataset and our mobile 360{\deg} camera dataset. Experiment results showed that Panopticus improves accuracy by 62% on average given the strict latency objective of 33ms. Also, Panopticus achieves a 2.1{\times} latency reduction on average compared to baselines.
Time Series Imputation with Multivariate Radial Basis Function Neural Network
Jul 31, 2024
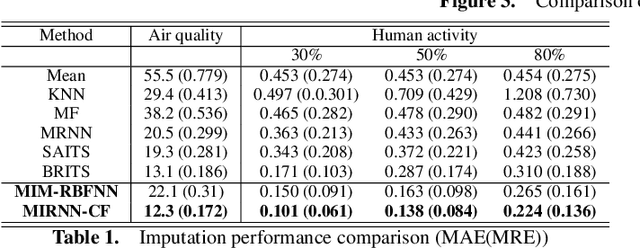
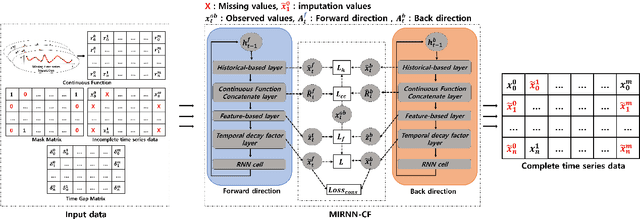
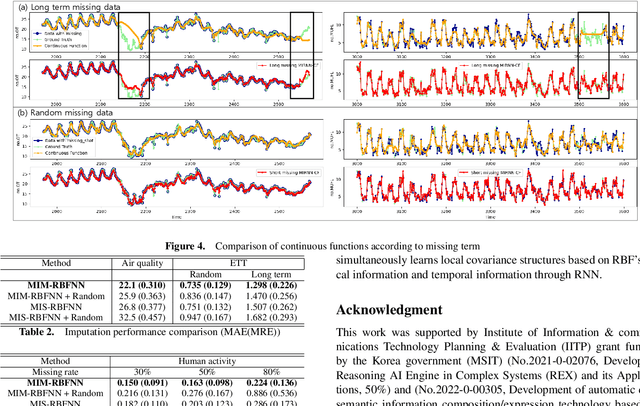
Researchers have been persistently working to address the issue of missing values in time series data. Numerous models have been proposed, striving to estimate the distribution of the data. The Radial Basis Functions Neural Network (RBFNN) has recently exhibited exceptional performance in estimating data distribution. In this paper, we propose a time series imputation model based on RBFNN. Our imputation model learns local information from timestamps to create a continuous function. Additionally, we incorporate time gaps to facilitate learning information considering the missing terms of missing values. We name this model the Missing Imputation Multivariate RBFNN (MIM-RBFNN). However, MIM-RBFNN relies on a local information-based learning approach, which presents difficulties in utilizing temporal information. Therefore, we propose an extension called the Missing Value Imputation Recurrent Neural Network with Continuous Function (MIRNN-CF) using the continuous function generated by MIM-RBFNN. We evaluate the performance using two real-world datasets with non-random missing and random missing patterns, and conduct an ablation study comparing MIM-RBFNN and MIRNN-CF.
Time Series Missing Imputation with Multivariate Radial Basis Function Neural Network
Jul 24, 2024Researchers have been persistently working to address the issue of missing values in time series data. Numerous models have been proposed, striving to estimate the distribution of the data. The Radial Basis Functions Neural Network (RBFNN) has recently exhibited exceptional performance in estimating data distribution. In this paper, we propose a time series imputation model based on RBFNN. Our imputation model learns local information from timestamps to create a continuous function. Additionally, we incorporate time gaps to facilitate learning information considering the missing terms of missing values. We name this model the Missing Imputation Multivariate RBFNN (MIM-RBFNN). However, MIM-RBFNN relies on a local information-based learning approach, which presents difficulties in utilizing temporal information. Therefore, we propose an extension called the Missing Value Imputation Recurrent Neural Network with Continuous Function (MIRNN-CF) using the continuous function generated by MIM-RBFNN. We evaluate the performance using two real-world datasets with non-random missing and random missing patterns, and conduct an ablation study comparing MIM-RBFNN and MIRNN-CF.
An Autonomous System for Head-to-Head Race: Design, Implementation and Analysis; Team KAIST at the Indy Autonomous Challenge
Mar 16, 2023While the majority of autonomous driving research has concentrated on everyday driving scenarios, further safety and performance improvements of autonomous vehicles require a focus on extreme driving conditions. In this context, autonomous racing is a new area of research that has been attracting considerable interest recently. Due to the fact that a vehicle is driven by its perception, planning, and control limits during racing, numerous research and development issues arise. This paper provides a comprehensive overview of the autonomous racing system built by team KAIST for the Indy Autonomous Challenge (IAC). Our autonomy stack consists primarily of a multi-modal perception module, a high-speed overtaking planner, a resilient control stack, and a system status manager. We present the details of all components of our autonomy solution, including algorithms, implementation, and unit test results. In addition, this paper outlines the design principles and the results of a systematical analysis. Even though our design principles are derived from the unique application domain of autonomous racing, they can also be applied to a variety of safety-critical, high-cost-of-failure robotics applications. The proposed system was integrated into a full-scale autonomous race car (Dallara AV-21) and field-tested extensively. As a result, team KAIST was one of three teams who qualified and participated in the official IAC race events without any accidents. Our proposed autonomous system successfully completed all missions, including overtaking at speeds of around $220 km/h$ in the IAC@CES2022, the world's first autonomous 1:1 head-to-head race.
Resilient Navigation and Path Planning System for High-speed Autonomous Race Car
Jul 25, 2022
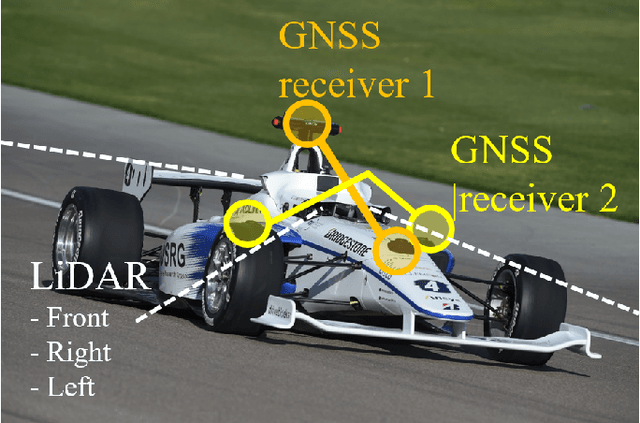
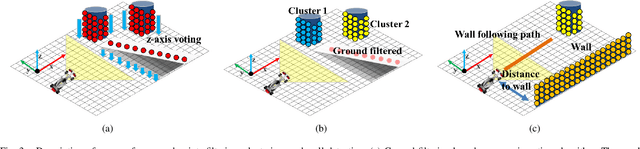
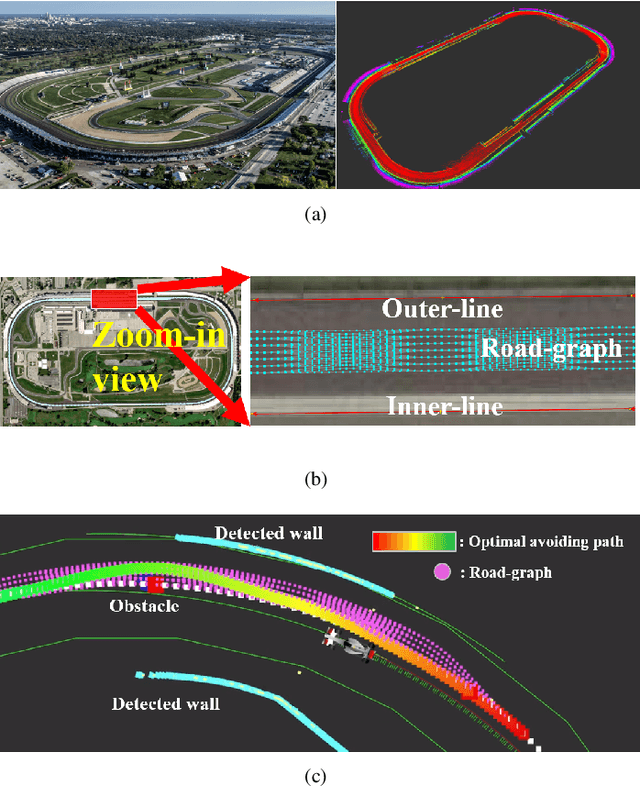
This paper describes resilient navigation and planning algorithm for high-speed autonomous race, Indy Autonomous Challenge (IAC). The IAC is a competition with full-scale autonomous race car that can drive up to 290 km/h(180mph). Due to its high-speed and heavy vibration of the race car, GPS/INS system is prone to be degraded. These degraded GPS measurements can cause a critical localization error leading to a serious crashing accidents. To this end, we propose a robust navigation system to implement multi-sensor fusion Kalman filter. In this study, we present how to identify the degradation of measurement based on probabilistic approaches. Based on this approach, we could compute optimal measurement values for Kalman filter correction step. At the same time, we present the other resilient navigation system so that race car can follow the race track in fatal localization failure situations. In addition, this paper also covers the optimal path planning algorithm for obstacle avoidance. To take account for original optimal racing line, obstacles, vehicle dynamics, we propose a road-graph-based path planning algorithm to guarantee our race car drives in-bounded conditions. In the experiments, we will evaluate our designed localization system can handle the degraded data, and sometimes prevent serious crashing accidents while high-speed driving. In addition, we will describe how we successfully completed the obstacle avoidance challenge.
Game-Theoretic Model Predictive Control with Data-Driven Identification of Vehicle Model for Head-to-Head Autonomous Racing
Jun 08, 2021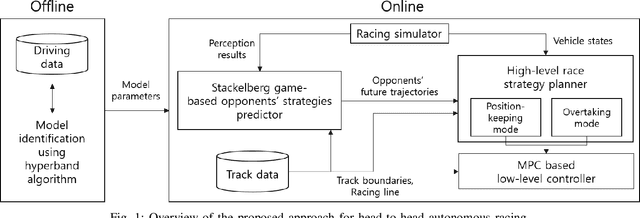
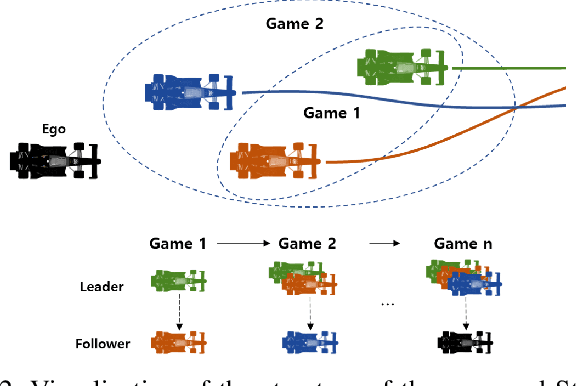
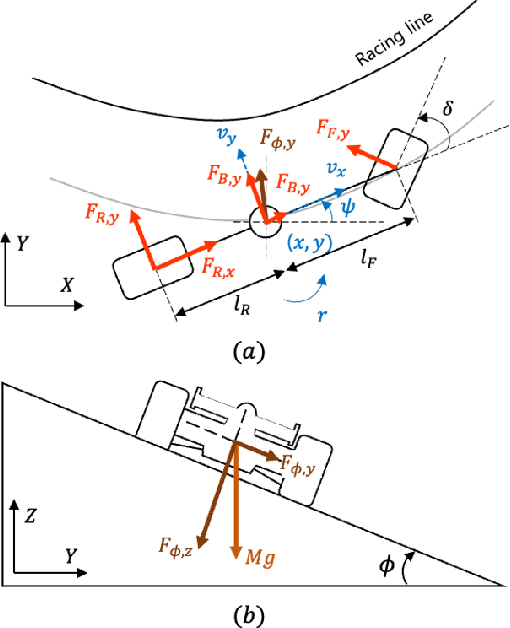
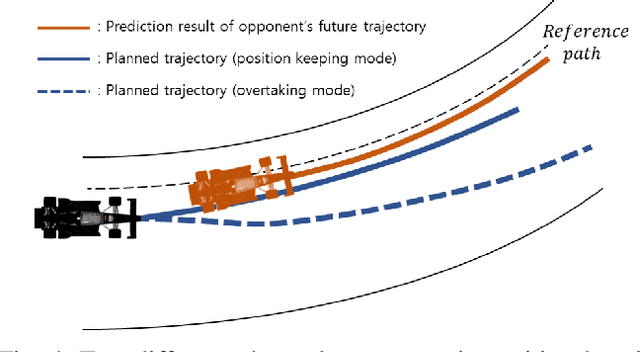
Resolving edge-cases in autonomous driving, head-to-head autonomous racing is getting a lot of attention from the industry and academia. In this study, we propose a game-theoretic model predictive control (MPC) approach for head-to-head autonomous racing and data-driven model identification method. For the practical estimation of nonlinear model parameters, we adopted the hyperband algorithm, which is used for neural model training in machine learning. The proposed controller comprises three modules: 1) game-based opponents' trajectory predictor, 2) high-level race strategy planner, and 3) MPC-based low-level controller. The game-based predictor was designed to predict the future trajectories of competitors. Based on the prediction results, the high-level race strategy planner plans several behaviors to respond to various race circumstances. Finally, the MPC-based controller computes the optimal control commands to follow the trajectories. The proposed approach was validated under various racing circumstances in an official simulator of the Indy Autonomous Challenge. The experimental results show that the proposed method can effectively overtake competitors, while driving through the track as quickly as possible without collisions.