 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Addendum to NeBula: Towards Extending TEAM CoSTAR's Solution to Larger Scale Environments
Apr 18, 2025This paper presents an appendix to the original NeBula autonomy solution developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), participating in the DARPA Subterranean Challenge. Specifically, this paper presents extensions to NeBula's hardware, software, and algorithmic components that focus on increasing the range and scale of the exploration environment. From the algorithmic perspective, we discuss the following extensions to the original NeBula framework: (i) large-scale geometric and semantic environment mapping; (ii) an adaptive positioning system; (iii) probabilistic traversability analysis and local planning; (iv) large-scale POMDP-based global motion planning and exploration behavior; (v) large-scale networking and decentralized reasoning; (vi) communication-aware mission planning; and (vii) multi-modal ground-aerial exploration solutions. We demonstrate the application and deployment of the presented systems and solutions in various large-scale underground environments, including limestone mine exploration scenarios as well as deployment in the DARPA Subterranean challenge.
A Collaborative Team of UAV-Hexapod for an Autonomous Retrieval System in GNSS-Denied Maritime Environments
Oct 12, 2024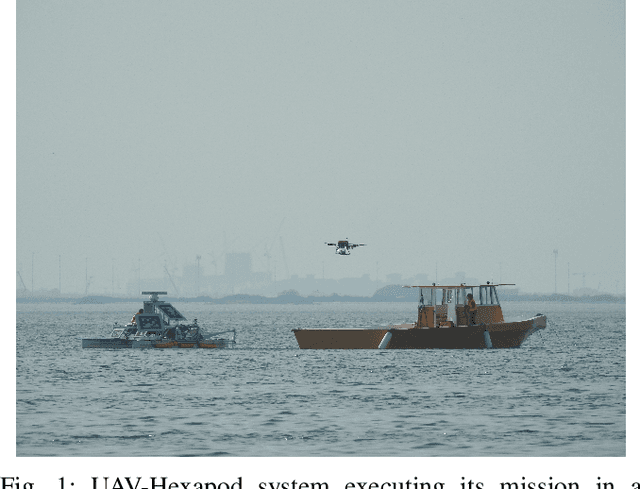
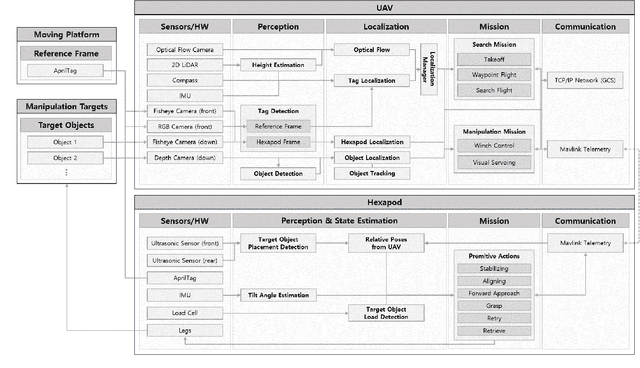
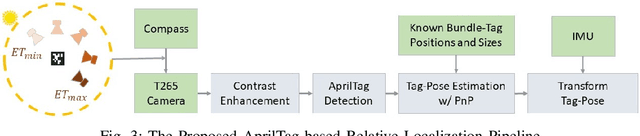
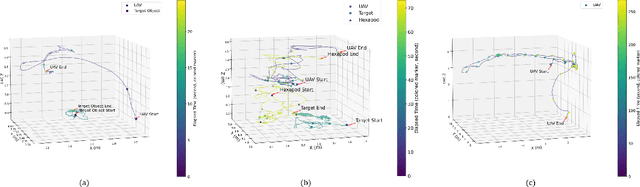
We present an integrated UAV-hexapod robotic system designed for GNSS-denied maritime operations, capable of autonomous deployment and retrieval of a hexapod robot via a winch mechanism installed on a UAV. This system is intended to address the challenges of localization, control, and mobility in dynamic maritime environments. Our solution leverages sensor fusion techniques, combining optical flow, LiDAR, and depth data for precise localization. Experimental results demonstrate the effectiveness of this system in real-world scenarios, validating its performance during field tests in both controlled and operational conditions in the MBZIRC 2023 Maritime Challenge.
SPIBOT: A Drone-Tethered Mobile Gripper for Robust Aerial Object Retrieval in Dynamic Environments
Sep 24, 2024



In real-world field operations, aerial grasping systems face significant challenges in dynamic environments due to strong winds, shifting surfaces, and the need to handle heavy loads. Particularly when dealing with heavy objects, the powerful propellers of the drone can inadvertently blow the target object away as it approaches, making the task even more difficult. To address these challenges, we introduce SPIBOT, a novel drone-tethered mobile gripper system designed for robust and stable autonomous target retrieval. SPIBOT operates via a tether, much like a spider, allowing the drone to maintain a safe distance from the target. To ensure both stable mobility and secure grasping capabilities, SPIBOT is equipped with six legs and sensors to estimate the robot's and mission's states. It is designed with a reduced volume and weight compared to other hexapod robots, allowing it to be easily stowed under the drone and reeled in as needed. Designed for the 2024 MBZIRC Maritime Grand Challenge, SPIBOT is built to retrieve a 1kg target object in the highly dynamic conditions of the moving deck of a ship. This system integrates a real-time action selection algorithm that dynamically adjusts the robot's actions based on proximity to the mission goal and environmental conditions, enabling rapid and robust mission execution. Experimental results across various terrains, including a pontoon on a lake, a grass field, and rubber mats on coastal sand, demonstrate SPIBOT's ability to efficiently and reliably retrieve targets. SPIBOT swiftly converges on the target and completes its mission, even when dealing with irregular initial states and noisy information introduced by the drone.
An Autonomous System for Head-to-Head Race: Design, Implementation and Analysis; Team KAIST at the Indy Autonomous Challenge
Mar 16, 2023While the majority of autonomous driving research has concentrated on everyday driving scenarios, further safety and performance improvements of autonomous vehicles require a focus on extreme driving conditions. In this context, autonomous racing is a new area of research that has been attracting considerable interest recently. Due to the fact that a vehicle is driven by its perception, planning, and control limits during racing, numerous research and development issues arise. This paper provides a comprehensive overview of the autonomous racing system built by team KAIST for the Indy Autonomous Challenge (IAC). Our autonomy stack consists primarily of a multi-modal perception module, a high-speed overtaking planner, a resilient control stack, and a system status manager. We present the details of all components of our autonomy solution, including algorithms, implementation, and unit test results. In addition, this paper outlines the design principles and the results of a systematical analysis. Even though our design principles are derived from the unique application domain of autonomous racing, they can also be applied to a variety of safety-critical, high-cost-of-failure robotics applications. The proposed system was integrated into a full-scale autonomous race car (Dallara AV-21) and field-tested extensively. As a result, team KAIST was one of three teams who qualified and participated in the official IAC race events without any accidents. Our proposed autonomous system successfully completed all missions, including overtaking at speeds of around $220 km/h$ in the IAC@CES2022, the world's first autonomous 1:1 head-to-head race.
Game-Theoretic Model Predictive Control with Data-Driven Identification of Vehicle Model for Head-to-Head Autonomous Racing
Jun 08, 2021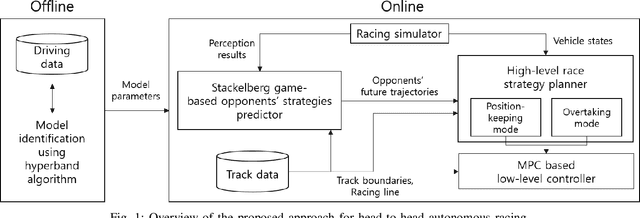
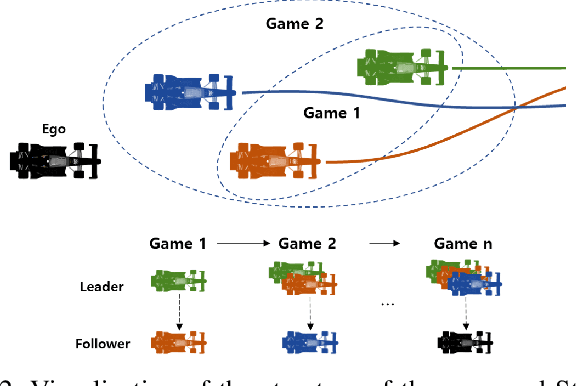
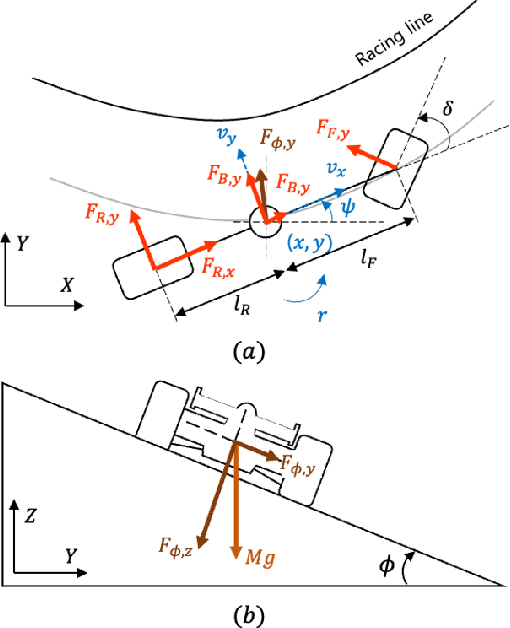
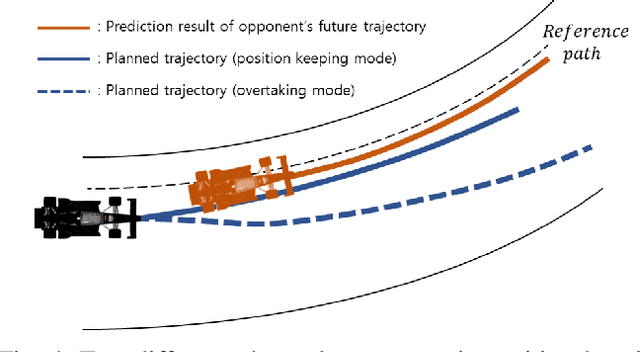
Resolving edge-cases in autonomous driving, head-to-head autonomous racing is getting a lot of attention from the industry and academia. In this study, we propose a game-theoretic model predictive control (MPC) approach for head-to-head autonomous racing and data-driven model identification method. For the practical estimation of nonlinear model parameters, we adopted the hyperband algorithm, which is used for neural model training in machine learning. The proposed controller comprises three modules: 1) game-based opponents' trajectory predictor, 2) high-level race strategy planner, and 3) MPC-based low-level controller. The game-based predictor was designed to predict the future trajectories of competitors. Based on the prediction results, the high-level race strategy planner plans several behaviors to respond to various race circumstances. Finally, the MPC-based controller computes the optimal control commands to follow the trajectories. The proposed approach was validated under various racing circumstances in an official simulator of the Indy Autonomous Challenge. The experimental results show that the proposed method can effectively overtake competitors, while driving through the track as quickly as possible without collisions.