Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Collaborative Team of UAV-Hexapod for an Autonomous Retrieval System in GNSS-Denied Maritime Environments
Paper and Code
Oct 12, 2024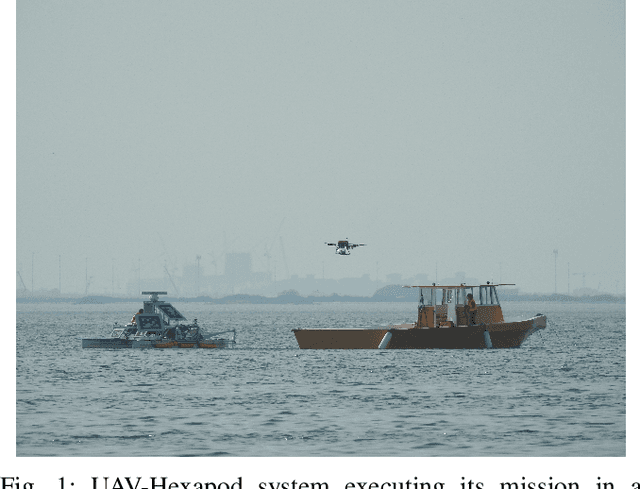
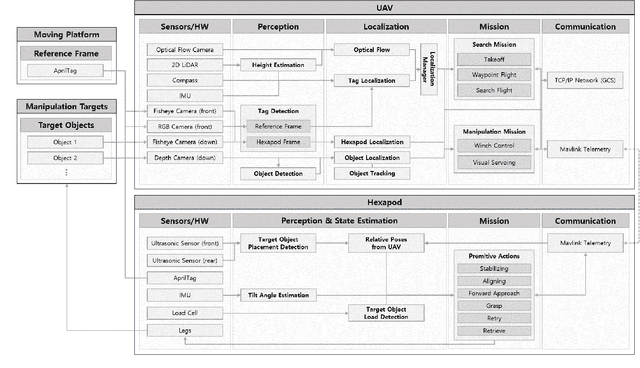
We present an integrated UAV-hexapod robotic system designed for GNSS-denied maritime operations, capable of autonomous deployment and retrieval of a hexapod robot via a winch mechanism installed on a UAV. This system is intended to address the challenges of localization, control, and mobility in dynamic maritime environments. Our solution leverages sensor fusion techniques, combining optical flow, LiDAR, and depth data for precise localization. Experimental results demonstrate the effectiveness of this system in real-world scenarios, validating its performance during field tests in both controlled and operational conditions in the MBZIRC 2023 Maritime Challenge.
View paper on