 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAny6D: Model-free 6D Pose Estimation of Novel Objects
Mar 25, 2025We introduce Any6D, a model-free framework for 6D object pose estimation that requires only a single RGB-D anchor image to estimate both the 6D pose and size of unknown objects in novel scenes. Unlike existing methods that rely on textured 3D models or multiple viewpoints, Any6D leverages a joint object alignment process to enhance 2D-3D alignment and metric scale estimation for improved pose accuracy. Our approach integrates a render-and-compare strategy to generate and refine pose hypotheses, enabling robust performance in scenarios with occlusions, non-overlapping views, diverse lighting conditions, and large cross-environment variations. We evaluate our method on five challenging datasets: REAL275, Toyota-Light, HO3D, YCBINEOAT, and LM-O, demonstrating its effectiveness in significantly outperforming state-of-the-art methods for novel object pose estimation. Project page: https://taeyeop.com/any6d
A Collaborative Team of UAV-Hexapod for an Autonomous Retrieval System in GNSS-Denied Maritime Environments
Oct 12, 2024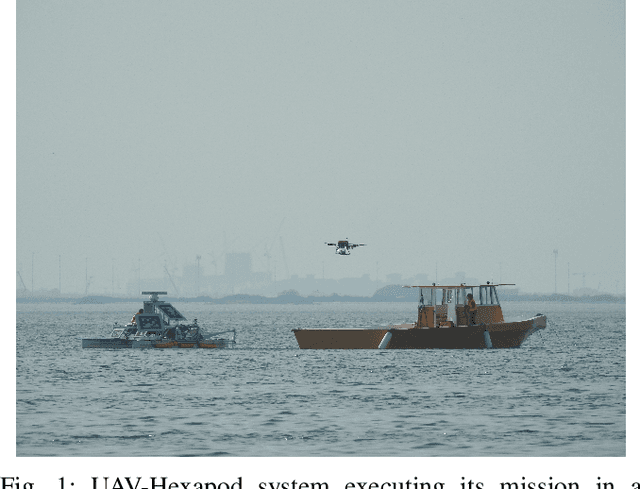
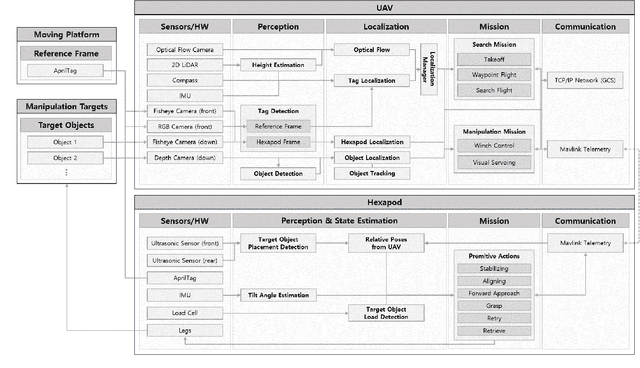
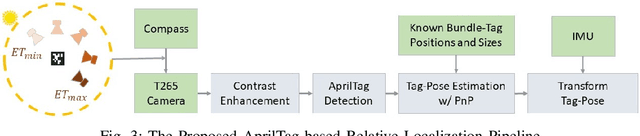
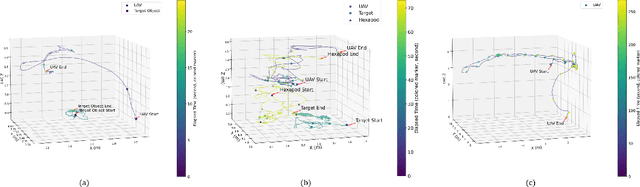
We present an integrated UAV-hexapod robotic system designed for GNSS-denied maritime operations, capable of autonomous deployment and retrieval of a hexapod robot via a winch mechanism installed on a UAV. This system is intended to address the challenges of localization, control, and mobility in dynamic maritime environments. Our solution leverages sensor fusion techniques, combining optical flow, LiDAR, and depth data for precise localization. Experimental results demonstrate the effectiveness of this system in real-world scenarios, validating its performance during field tests in both controlled and operational conditions in the MBZIRC 2023 Maritime Challenge.
SPIBOT: A Drone-Tethered Mobile Gripper for Robust Aerial Object Retrieval in Dynamic Environments
Sep 24, 2024



In real-world field operations, aerial grasping systems face significant challenges in dynamic environments due to strong winds, shifting surfaces, and the need to handle heavy loads. Particularly when dealing with heavy objects, the powerful propellers of the drone can inadvertently blow the target object away as it approaches, making the task even more difficult. To address these challenges, we introduce SPIBOT, a novel drone-tethered mobile gripper system designed for robust and stable autonomous target retrieval. SPIBOT operates via a tether, much like a spider, allowing the drone to maintain a safe distance from the target. To ensure both stable mobility and secure grasping capabilities, SPIBOT is equipped with six legs and sensors to estimate the robot's and mission's states. It is designed with a reduced volume and weight compared to other hexapod robots, allowing it to be easily stowed under the drone and reeled in as needed. Designed for the 2024 MBZIRC Maritime Grand Challenge, SPIBOT is built to retrieve a 1kg target object in the highly dynamic conditions of the moving deck of a ship. This system integrates a real-time action selection algorithm that dynamically adjusts the robot's actions based on proximity to the mission goal and environmental conditions, enabling rapid and robust mission execution. Experimental results across various terrains, including a pontoon on a lake, a grass field, and rubber mats on coastal sand, demonstrate SPIBOT's ability to efficiently and reliably retrieve targets. SPIBOT swiftly converges on the target and completes its mission, even when dealing with irregular initial states and noisy information introduced by the drone.
A Versatile Door Opening System with Mobile Manipulator through Adaptive Position-Force Control and Reinforcement Learning
Jul 10, 2023


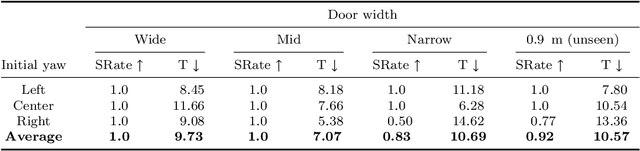
The ability of robots to navigate through doors is crucial for their effective operation in indoor environments. Consequently, extensive research has been conducted to develop robots capable of opening specific doors. However, the diverse combinations of door handles and opening directions necessitate a more versatile door opening system for robots to successfully operate in real-world environments. In this paper, we propose a mobile manipulator system that can autonomously open various doors without prior knowledge. By using convolutional neural networks, point cloud extraction techniques, and external force measurements during exploratory motion, we obtained information regarding handle types, poses, and door characteristics. Through two different approaches, adaptive position-force control and deep reinforcement learning, we successfully opened doors without precise trajectory or excessive external force. The adaptive position-force control method involves moving the end-effector in the direction of the door opening while responding compliantly to external forces, ensuring safety and manipulator workspace. Meanwhile, the deep reinforcement learning policy minimizes applied forces and eliminates unnecessary movements, enabling stable operation across doors with different poses and widths. The RL-based approach outperforms the adaptive position-force control method in terms of compensating for external forces, ensuring smooth motion, and achieving efficient speed. It reduces the maximum force required by 3.27 times and improves motion smoothness by 1.82 times. However, the non-learning-based adaptive position-force control method demonstrates more versatility in opening a wider range of doors, encompassing revolute doors with four distinct opening directions and varying widths.
Design, Field Evaluation, and Traffic Analysis of a Competitive Autonomous Driving Model in a Congested Environment
Nov 07, 2022



Recently, numerous studies have investigated cooperative traffic systems using the communication among vehicle-to-everything (V2X). Unfortunately, when multiple autonomous vehicles are deployed while exposed to communication failure, there might be a conflict of ideal conditions between various autonomous vehicles leading to adversarial situation on the roads. In South Korea, virtual and real-world urban autonomous multi-vehicle races were held in March and November of 2021, respectively. During the competition, multiple vehicles were involved simultaneously, which required maneuvers such as overtaking low-speed vehicles, negotiating intersections, and obeying traffic laws. In this study, we introduce a fully autonomous driving software stack to deploy a competitive driving model, which enabled us to win the urban autonomous multi-vehicle races. We evaluate module-based systems such as navigation, perception, and planning in real and virtual environments. Additionally, an analysis of traffic is performed after collecting multiple vehicle position data over communication to gain additional insight into a multi-agent autonomous driving scenario. Finally, we propose a method for analyzing traffic in order to compare the spatial distribution of multiple autonomous vehicles. We study the similarity distribution between each team's driving log data to determine the impact of competitive autonomous driving on the traffic environment.