 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgentSUMO: An Agentic Framework for Interactive Simulation Scenario Generation in SUMO via Large Language Models
Nov 10, 2025The growing complexity of urban mobility systems has made traffic simulation indispensable for evidence-based transportation planning and policy evaluation. However, despite the analytical capabilities of platforms such as the Simulation of Urban MObility (SUMO), their application remains largely confined to domain experts. Developing realistic simulation scenarios requires expertise in network construction, origin-destination modeling, and parameter configuration for policy experimentation, creating substantial barriers for non-expert users such as policymakers, urban planners, and city officials. Moreover, the requests expressed by these users are often incomplete and abstract-typically articulated as high-level objectives, which are not well aligned with the imperative, sequential workflows employed in existing language-model-based simulation frameworks. To address these challenges, this study proposes AgentSUMO, an agentic framework for interactive simulation scenario generation via large language models. AgentSUMO departs from imperative, command-driven execution by introducing an adaptive reasoning layer that interprets user intents, assesses task complexity, infers missing parameters, and formulates executable simulation plans. The framework is structured around two complementary components, the Interactive Planning Protocol, which governs reasoning and user interaction, and the Model Context Protocol, which manages standardized communication and orchestration among simulation tools. Through this design, AgentSUMO converts abstract policy objectives into executable simulation scenarios. Experiments on urban networks in Seoul and Manhattan demonstrate that the agentic workflow achieves substantial improvements in traffic flow metrics while maintaining accessibility for non-expert users, successfully bridging the gap between policy goals and executable simulation workflows.
How Well Do Vision--Language Models Understand Cities? A Comparative Study on Spatial Reasoning from Street-View Images
Aug 29, 2025



Effectively understanding urban scenes requires fine-grained spatial reasoning about objects, layouts, and depth cues. However, how well current vision-language models (VLMs), pretrained on general scenes, transfer these abilities to urban domain remains underexplored. To address this gap, we conduct a comparative study of three off-the-shelf VLMs-BLIP-2, InstructBLIP, and LLaVA-1.5-evaluating both zero-shot performance and the effects of fine-tuning with a synthetic VQA dataset specific to urban scenes. We construct such dataset from segmentation, depth, and object detection predictions of street-view images, pairing each question with LLM-generated Chain-of-Thought (CoT) answers for step-by-step reasoning supervision. Results show that while VLMs perform reasonably well in zero-shot settings, fine-tuning with our synthetic CoT-supervised dataset substantially boosts performance, especially for challenging question types such as negation and counterfactuals. This study introduces urban spatial reasoning as a new challenge for VLMs and demonstrates synthetic dataset construction as a practical path for adapting general-purpose models to specialized domains.
MobiCLR: Mobility Time Series Contrastive Learning for Urban Region Representations
Feb 05, 2025


Recently, learning effective representations of urban regions has gained significant attention as a key approach to understanding urban dynamics and advancing smarter cities. Existing approaches have demonstrated the potential of leveraging mobility data to generate latent representations, providing valuable insights into the intrinsic characteristics of urban areas. However, incorporating the temporal dynamics and detailed semantics inherent in human mobility patterns remains underexplored. To address this gap, we propose a novel urban region representation learning model, Mobility Time Series Contrastive Learning for Urban Region Representations (MobiCLR), designed to capture semantically meaningful embeddings from inflow and outflow mobility patterns. MobiCLR uses contrastive learning to enhance the discriminative power of its representations, applying an instance-wise contrastive loss to capture distinct flow-specific characteristics. Additionally, we develop a regularizer to align output features with these flow-specific representations, enabling a more comprehensive understanding of mobility dynamics. To validate our model, we conduct extensive experiments in Chicago, New York, and Washington, D.C. to predict income, educational attainment, and social vulnerability. The results demonstrate that our model outperforms state-of-the-art models.
TopoCL: Topological Contrastive Learning for Time Series
Feb 05, 2025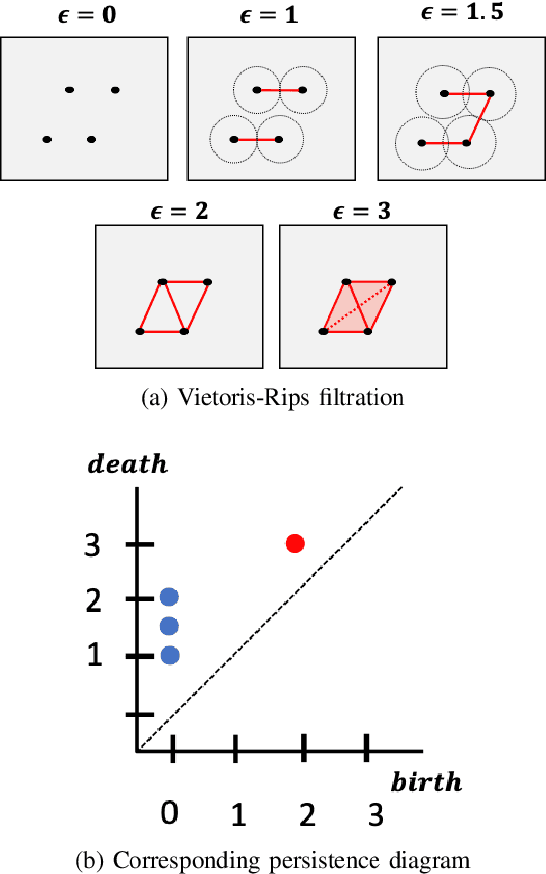
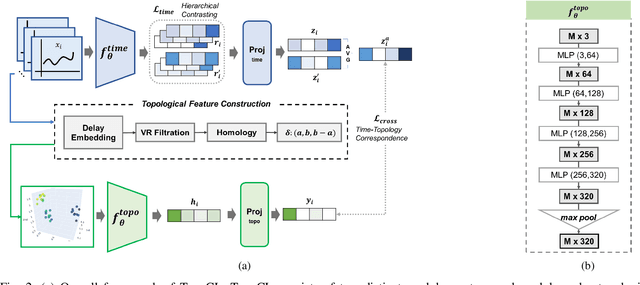
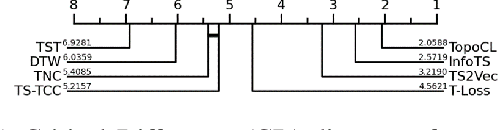
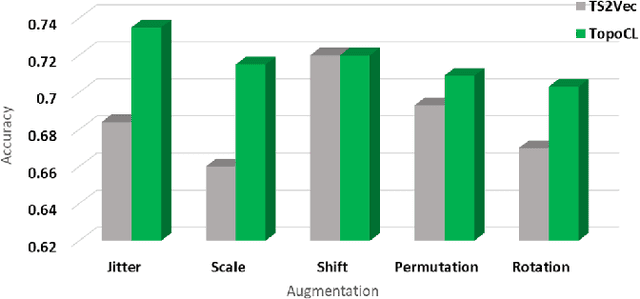
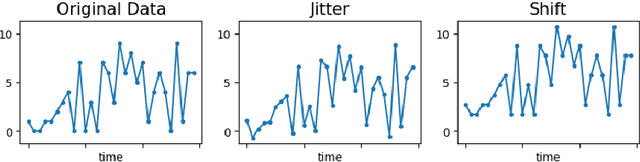
Universal time series representation learning is challenging but valuable in real-world applications such as classification, anomaly detection, and forecasting. Recently, contrastive learning (CL) has been actively explored to tackle time series representation. However, a key challenge is that the data augmentation process in CL can distort seasonal patterns or temporal dependencies, inevitably leading to a loss of semantic information. To address this challenge, we propose Topological Contrastive Learning for time series (TopoCL). TopoCL mitigates such information loss by incorporating persistent homology, which captures the topological characteristics of data that remain invariant under transformations. In this paper, we treat the temporal and topological properties of time series data as distinct modalities. Specifically, we compute persistent homology to construct topological features of time series data, representing them in persistence diagrams. We then design a neural network to encode these persistent diagrams. Our approach jointly optimizes CL within the time modality and time-topology correspondence, promoting a comprehensive understanding of both temporal semantics and topological properties of time series. We conduct extensive experiments on four downstream tasks-classification, anomaly detection, forecasting, and transfer learning. The results demonstrate that TopoCL achieves state-of-the-art performance.
Design, Field Evaluation, and Traffic Analysis of a Competitive Autonomous Driving Model in a Congested Environment
Nov 07, 2022



Recently, numerous studies have investigated cooperative traffic systems using the communication among vehicle-to-everything (V2X). Unfortunately, when multiple autonomous vehicles are deployed while exposed to communication failure, there might be a conflict of ideal conditions between various autonomous vehicles leading to adversarial situation on the roads. In South Korea, virtual and real-world urban autonomous multi-vehicle races were held in March and November of 2021, respectively. During the competition, multiple vehicles were involved simultaneously, which required maneuvers such as overtaking low-speed vehicles, negotiating intersections, and obeying traffic laws. In this study, we introduce a fully autonomous driving software stack to deploy a competitive driving model, which enabled us to win the urban autonomous multi-vehicle races. We evaluate module-based systems such as navigation, perception, and planning in real and virtual environments. Additionally, an analysis of traffic is performed after collecting multiple vehicle position data over communication to gain additional insight into a multi-agent autonomous driving scenario. Finally, we propose a method for analyzing traffic in order to compare the spatial distribution of multiple autonomous vehicles. We study the similarity distribution between each team's driving log data to determine the impact of competitive autonomous driving on the traffic environment.
Effective Urban Region Representation Learning Using Heterogeneous Urban Graph Attention Network (HUGAT)
Feb 18, 2022



Revealing the hidden patterns shaping the urban environment is essential to understand its dynamics and to make cities smarter. Recent studies have demonstrated that learning the representations of urban regions can be an effective strategy to uncover the intrinsic characteristics of urban areas. However, existing studies lack in incorporating diversity in urban data sources. In this work, we propose heterogeneous urban graph attention network (HUGAT), which incorporates heterogeneity of diverse urban datasets. In HUGAT, heterogeneous urban graph (HUG) incorporates both the geo-spatial and temporal people movement variations in a single graph structure. Given a HUG, a set of meta-paths are designed to capture the rich urban semantics as composite relations between nodes. Region embedding is carried out using heterogeneous graph attention network (HAN). HUGAT is designed to consider multiple learning objectives of city's geo-spatial and mobility variations simultaneously. In our extensive experiments on NYC data, HUGAT outperformed all the state-of-the-art models. Moreover, it demonstrated a robust generalization capability across the various prediction tasks of crime, average personal income, and bike flow as well as the spatial clustering task.
PGCN: Progressive Graph Convolutional Networks for Spatial-Temporal Traffic Forecasting
Feb 18, 2022
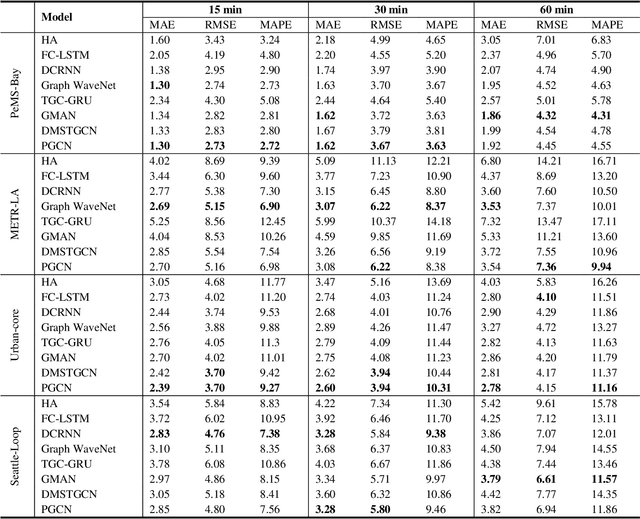
The complex spatial-temporal correlations in transportation networks make the traffic forecasting problem challenging. Since transportation system inherently possesses graph structures, much research efforts have been put with graph neural networks. Recently, constructing adaptive graphs to the data has shown promising results over the models relying on a single static graph structure. However, the graph adaptations are applied during the training phases, and do not reflect the data used during the testing phases. Such shortcomings can be problematic especially in traffic forecasting since the traffic data often suffers from the unexpected changes and irregularities in the time series. In this study, we propose a novel traffic forecasting framework called Progressive Graph Convolutional Network (PGCN). PGCN constructs a set of graphs by progressively adapting to input data during the training and the testing phases. Specifically, we implemented the model to construct progressive adjacency matrices by learning trend similarities among graph nodes. Then, the model is combined with the dilated causal convolution and gated activation unit to extract temporal features. With residual and skip connections, PGCN performs the traffic prediction. When applied to four real-world traffic datasets of diverse geometric nature, the proposed model achieves state-of-the-art performance with consistency in all datasets. We conclude that the ability of PGCN to progressively adapt to input data enables the model to generalize in different study sites with robustness.
A Comparative Study on Basic Elements of Deep Learning Models for Spatial-Temporal Traffic Forecasting
Nov 15, 2021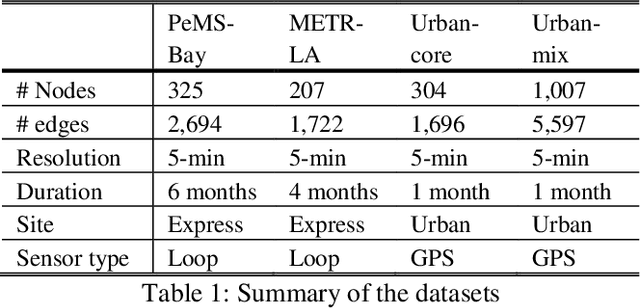
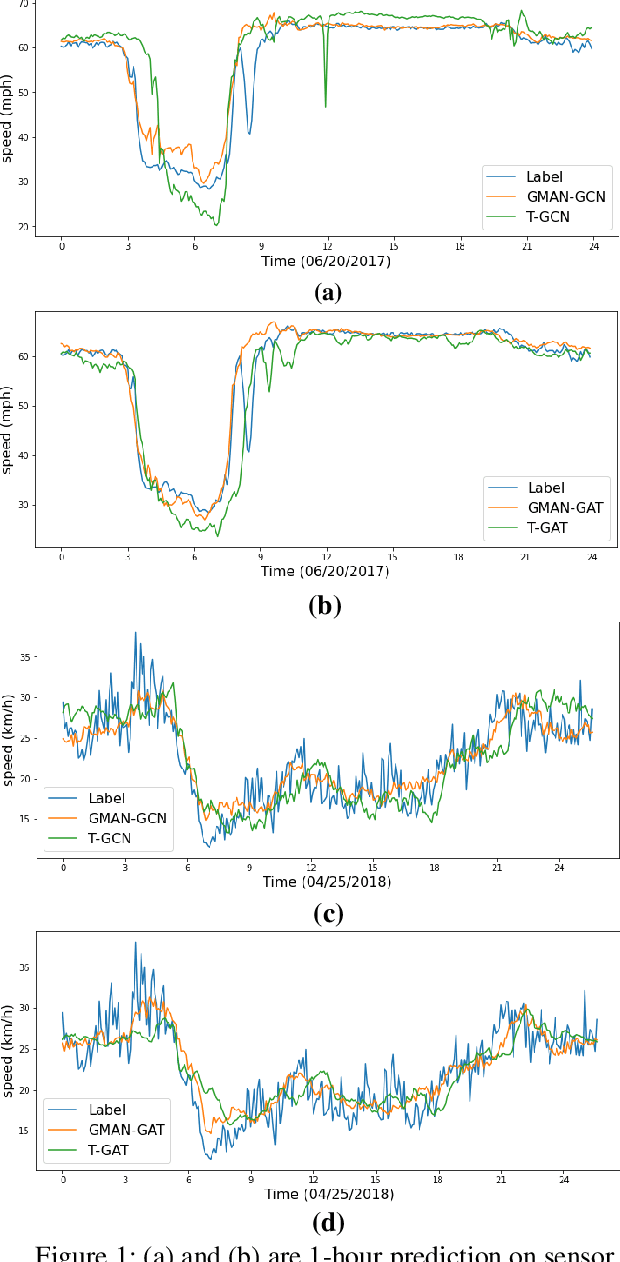
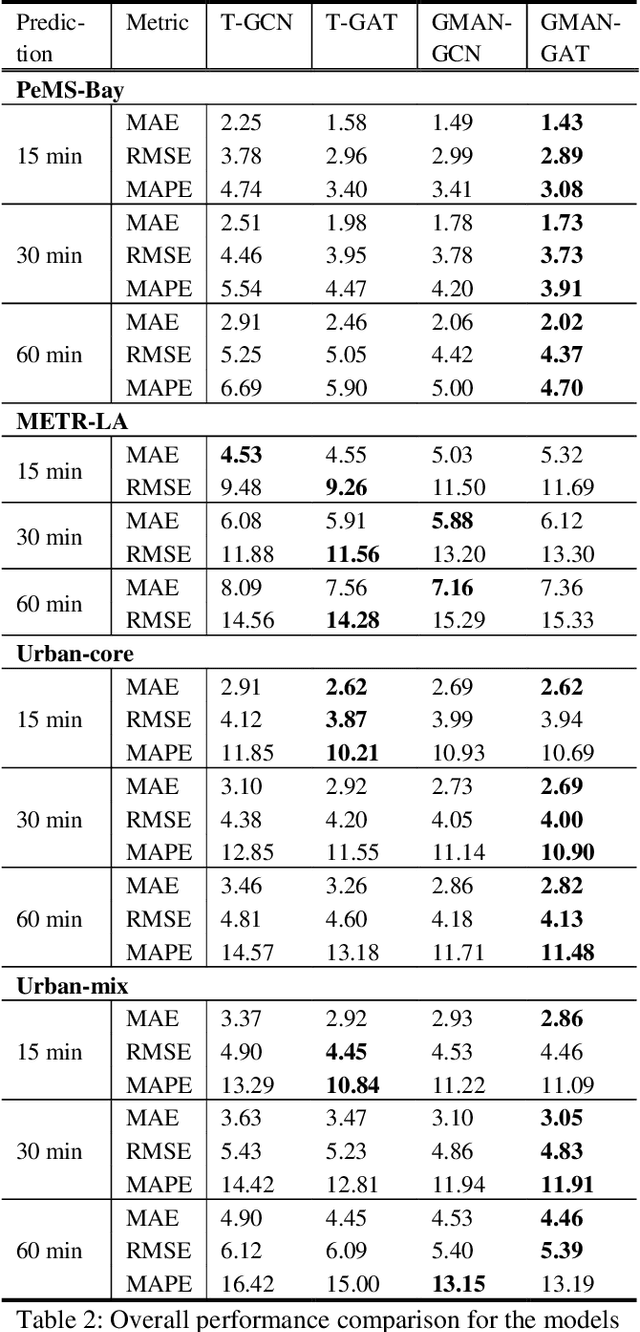
Traffic forecasting plays a crucial role in intelligent transportation systems. The spatial-temporal complexities in transportation networks make the problem especially challenging. The recently suggested deep learning models share basic elements such as graph convolution, graph attention, recurrent units, and/or attention mechanism. In this study, we designed an in-depth comparative study for four deep neural network models utilizing different basic elements. For base models, one RNN-based model and one attention-based model were chosen from previous literature. Then, the spatial feature extraction layers in the models were substituted with graph convolution and graph attention. To analyze the performance of each element in various environments, we conducted experiments on four real-world datasets - highway speed, highway flow, urban speed from a homogeneous road link network, and urban speed from a heterogeneous road link network. The results demonstrate that the RNN-based model and the attention-based model show a similar level of performance for short-term prediction, and the attention-based model outperforms the RNN in longer-term predictions. The choice of graph convolution and graph attention makes a larger difference in the RNN-based models. Also, our modified version of GMAN shows comparable performance with the original with less memory consumption.
Short-term Traffic Prediction with Deep Neural Networks: A Survey
Aug 28, 2020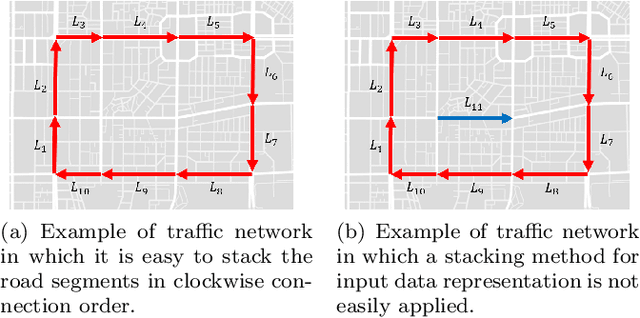
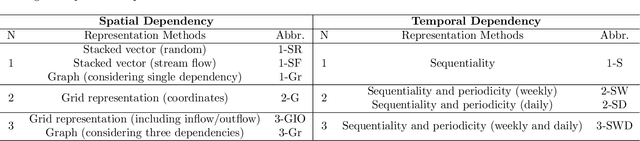
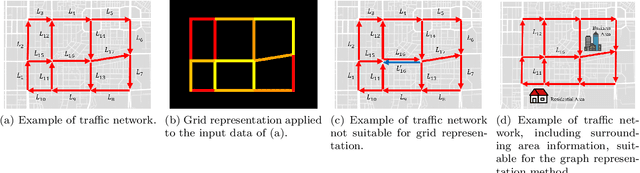
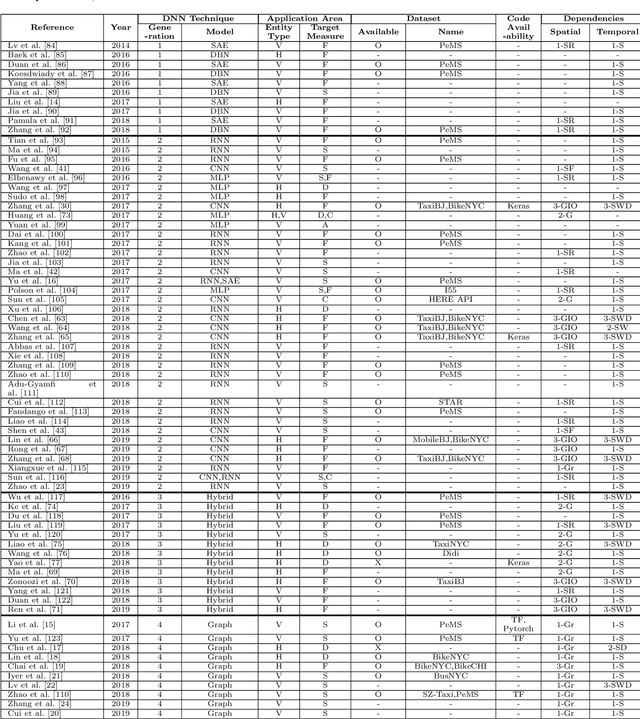
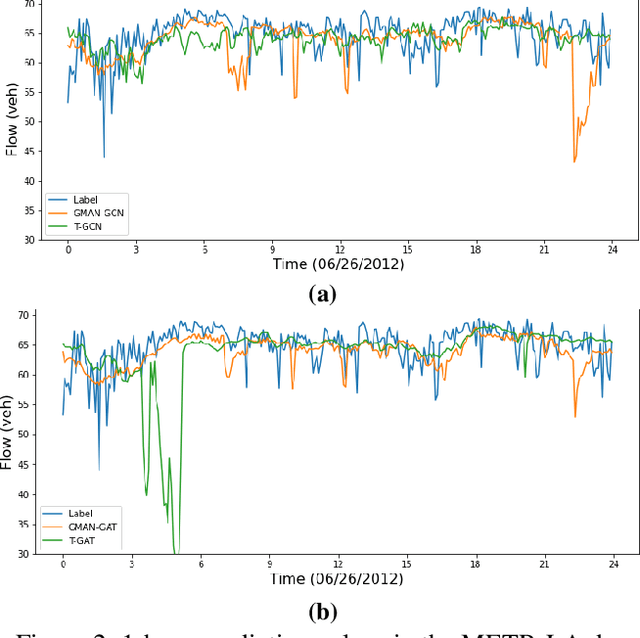
In modern transportation systems, an enormous amount of traffic data is generated every day. This has led to rapid progress in short-term traffic prediction (STTP), in which deep learning methods have recently been applied. In traffic networks with complex spatiotemporal relationships, deep neural networks (DNNs) often perform well because they are capable of automatically extracting the most important features and patterns. In this study, we survey recent STTP studies applying deep networks from four perspectives. 1) We summarize input data representation methods according to the number and type of spatial and temporal dependencies involved. 2) We briefly explain a wide range of DNN techniques from the earliest networks, including Restricted Boltzmann Machines, to the most recent, including graph-based and meta-learning networks. 3) We summarize previous STTP studies in terms of the type of DNN techniques, application area, dataset and code availability, and the type of the represented spatiotemporal dependencies. 4) We compile public traffic datasets that are popular and can be used as the standard benchmarks. Finally, we suggest challenging issues and possible future research directions in STTP.
Incorporating Dynamicity of Transportation Network with Multi-Weight Traffic Graph Convolution for Traffic Forecasting
Sep 16, 2019

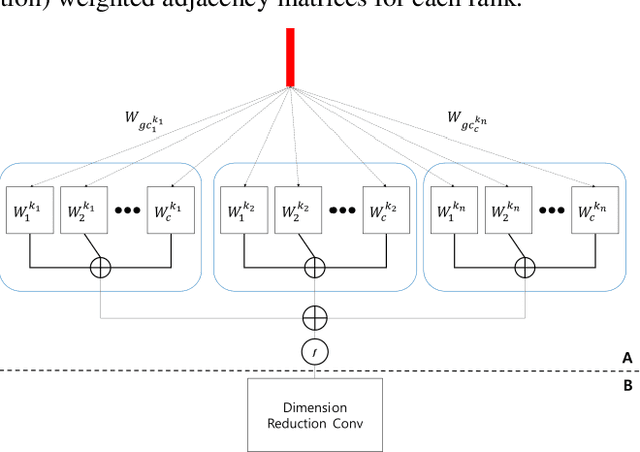
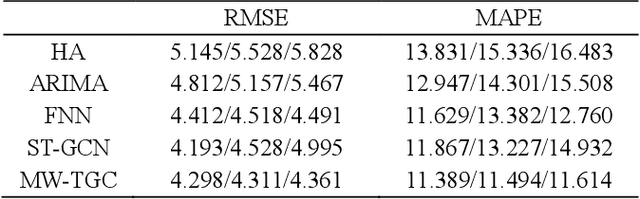
Graph Convolutional Networks (GCN) have given the ability to model complex spatial and temporal dependencies in traffic data and improve the performance of predictions. In many studies, however, features that can represent the transportation networks such as speed limit, distance, and flow direction are overlooked. Learning without these structural features may not capture spatial dependencies and lead to low performance especially on roads with unusual characteristics. To address this challenge, we suggest a novel GCN structure that can incorporate multiple weights at the same time. The proposed model, Multi-Weight Traffic Graph Convolutional Networks (MW-TGC) conduct convolution operation on traffic data with multiple weighted adjacency matrices and combines the features obtained from each operation. The spatially isolated dimension reduction operation is conducted on the combined features to learn the dependencies among the features and reduce the size of output to a computationally feasible level. The output of multi-weight graph convolution is given to the Long Short-Term Memory (LSTM) to learn temporal dependencies. Experiment on two real-world datasets for 5min average speed of Seoul is conducted to evaluate the performance. The result shows that the proposed model outperforms the state-of-the-art models and reduces the inconsistency of prediction among roads with different characteristics.