 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePGCN: Progressive Graph Convolutional Networks for Spatial-Temporal Traffic Forecasting
Feb 18, 2022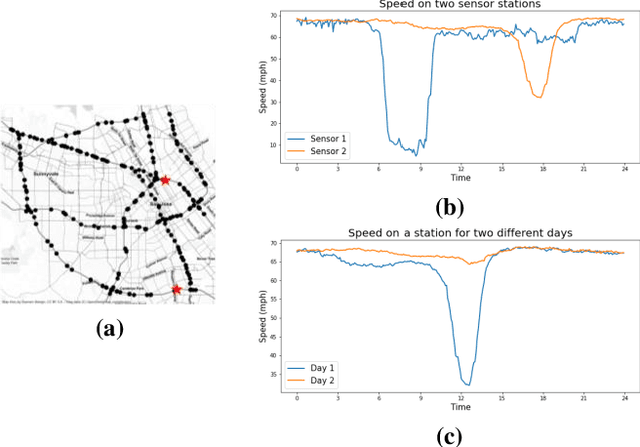
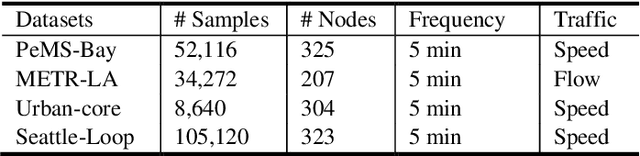
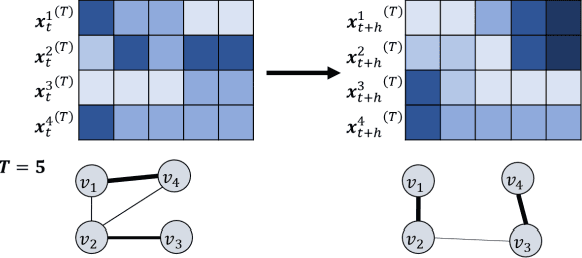
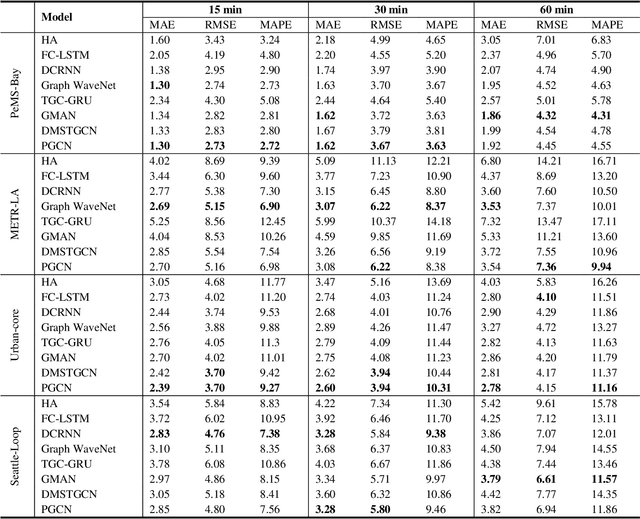
The complex spatial-temporal correlations in transportation networks make the traffic forecasting problem challenging. Since transportation system inherently possesses graph structures, much research efforts have been put with graph neural networks. Recently, constructing adaptive graphs to the data has shown promising results over the models relying on a single static graph structure. However, the graph adaptations are applied during the training phases, and do not reflect the data used during the testing phases. Such shortcomings can be problematic especially in traffic forecasting since the traffic data often suffers from the unexpected changes and irregularities in the time series. In this study, we propose a novel traffic forecasting framework called Progressive Graph Convolutional Network (PGCN). PGCN constructs a set of graphs by progressively adapting to input data during the training and the testing phases. Specifically, we implemented the model to construct progressive adjacency matrices by learning trend similarities among graph nodes. Then, the model is combined with the dilated causal convolution and gated activation unit to extract temporal features. With residual and skip connections, PGCN performs the traffic prediction. When applied to four real-world traffic datasets of diverse geometric nature, the proposed model achieves state-of-the-art performance with consistency in all datasets. We conclude that the ability of PGCN to progressively adapt to input data enables the model to generalize in different study sites with robustness.
A Comparative Study on Basic Elements of Deep Learning Models for Spatial-Temporal Traffic Forecasting
Nov 15, 2021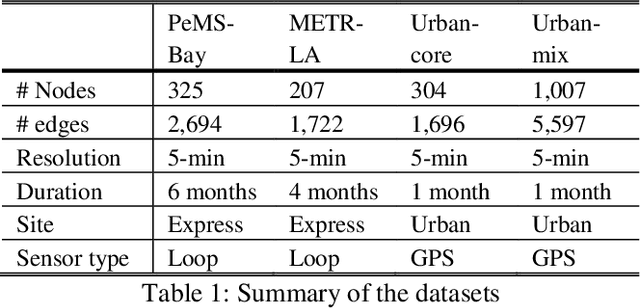
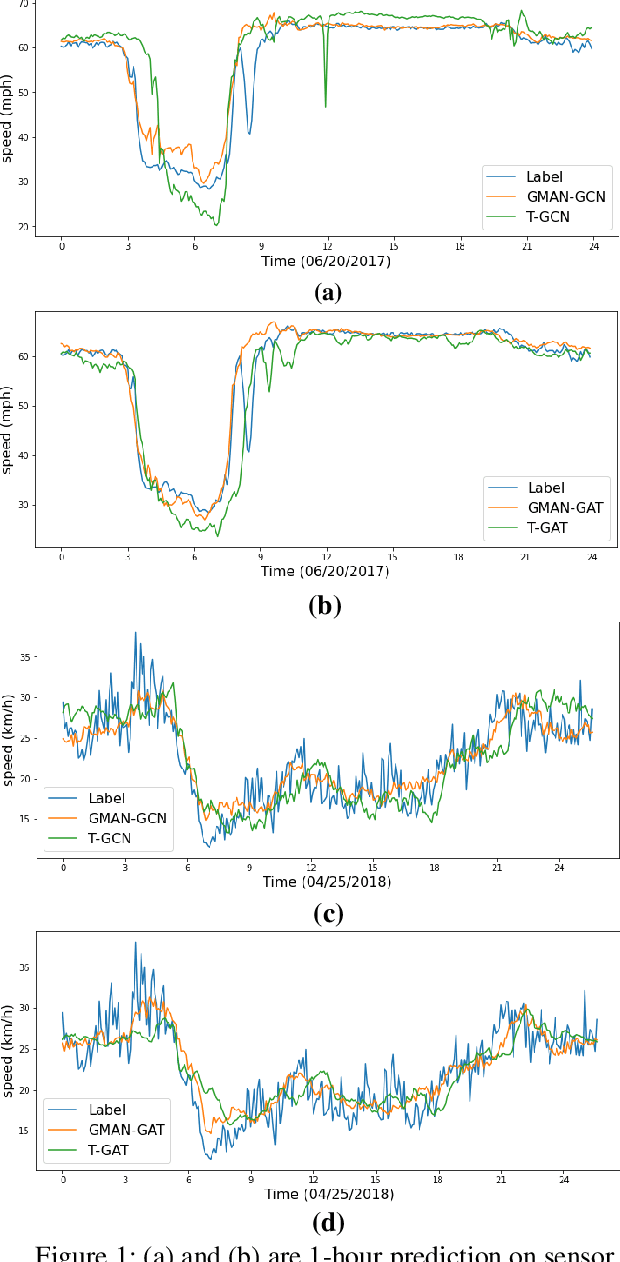
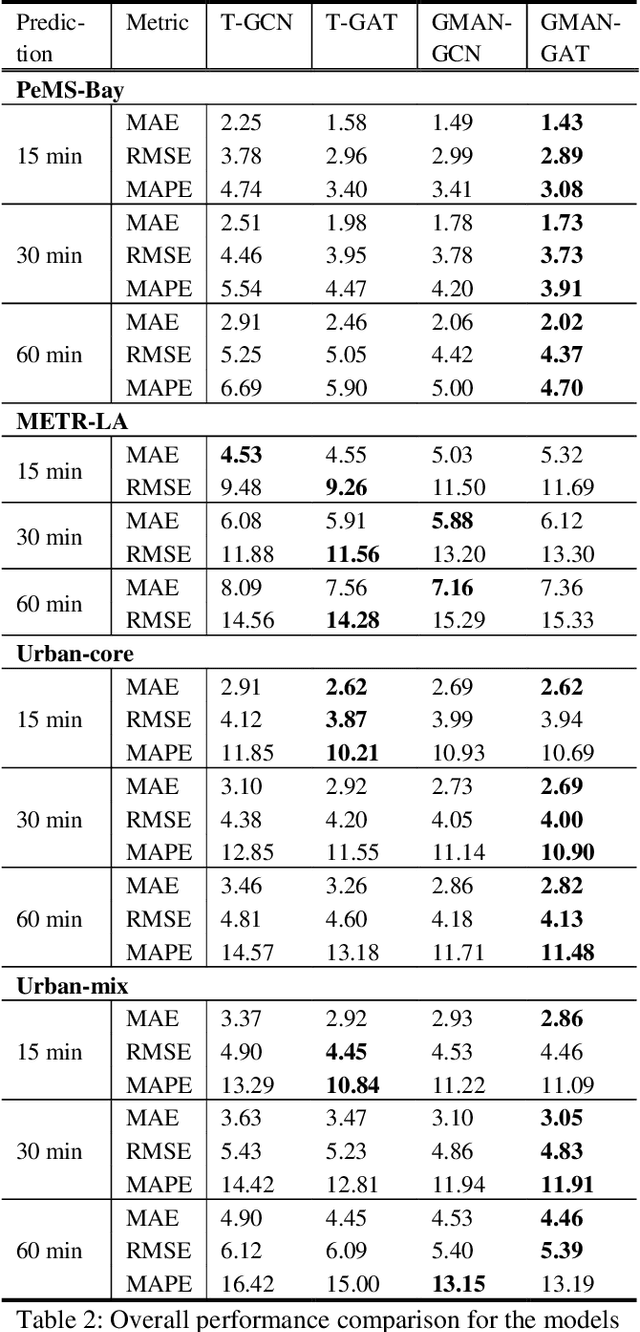
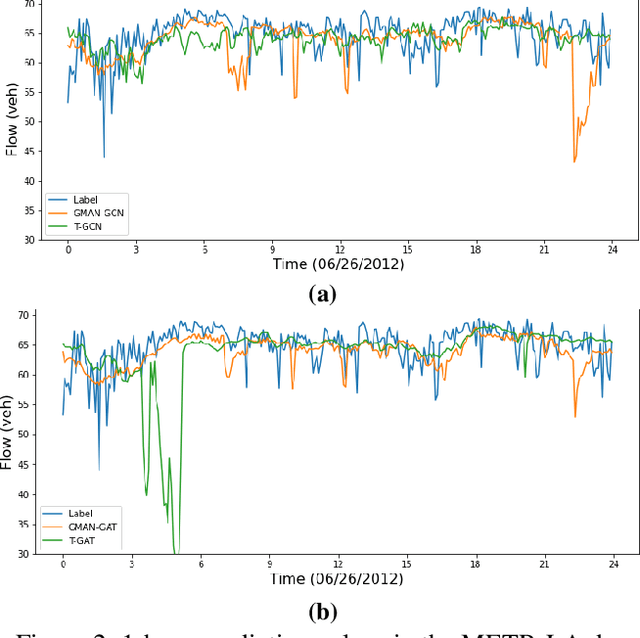
Traffic forecasting plays a crucial role in intelligent transportation systems. The spatial-temporal complexities in transportation networks make the problem especially challenging. The recently suggested deep learning models share basic elements such as graph convolution, graph attention, recurrent units, and/or attention mechanism. In this study, we designed an in-depth comparative study for four deep neural network models utilizing different basic elements. For base models, one RNN-based model and one attention-based model were chosen from previous literature. Then, the spatial feature extraction layers in the models were substituted with graph convolution and graph attention. To analyze the performance of each element in various environments, we conducted experiments on four real-world datasets - highway speed, highway flow, urban speed from a homogeneous road link network, and urban speed from a heterogeneous road link network. The results demonstrate that the RNN-based model and the attention-based model show a similar level of performance for short-term prediction, and the attention-based model outperforms the RNN in longer-term predictions. The choice of graph convolution and graph attention makes a larger difference in the RNN-based models. Also, our modified version of GMAN shows comparable performance with the original with less memory consumption.