 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGame-Theoretic Model Predictive Control with Data-Driven Identification of Vehicle Model for Head-to-Head Autonomous Racing
Paper and Code
Jun 08, 2021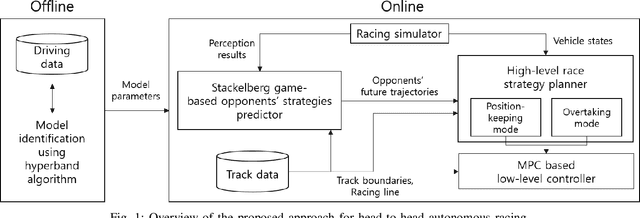
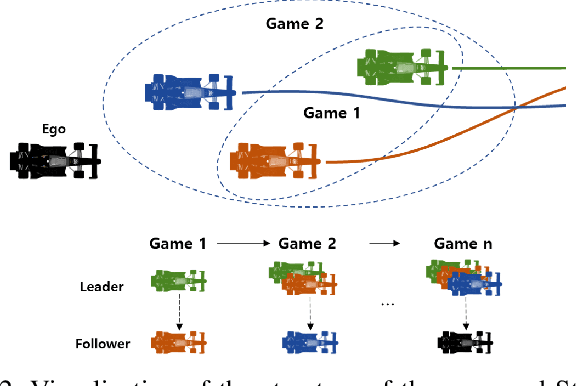
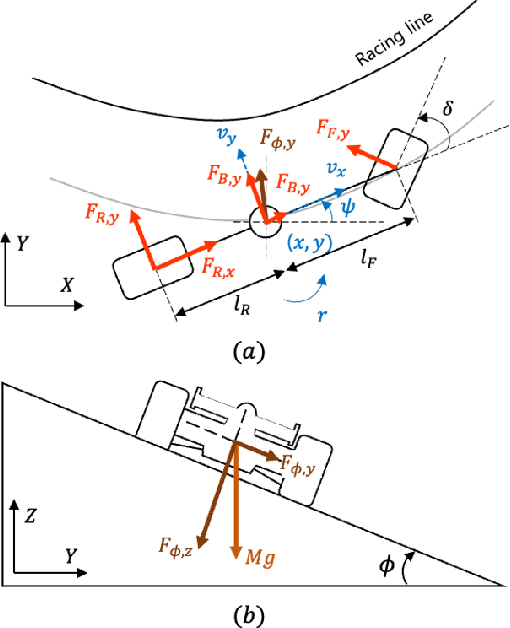
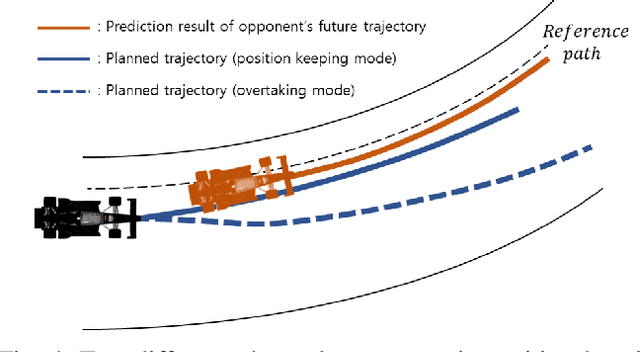
Resolving edge-cases in autonomous driving, head-to-head autonomous racing is getting a lot of attention from the industry and academia. In this study, we propose a game-theoretic model predictive control (MPC) approach for head-to-head autonomous racing and data-driven model identification method. For the practical estimation of nonlinear model parameters, we adopted the hyperband algorithm, which is used for neural model training in machine learning. The proposed controller comprises three modules: 1) game-based opponents' trajectory predictor, 2) high-level race strategy planner, and 3) MPC-based low-level controller. The game-based predictor was designed to predict the future trajectories of competitors. Based on the prediction results, the high-level race strategy planner plans several behaviors to respond to various race circumstances. Finally, the MPC-based controller computes the optimal control commands to follow the trajectories. The proposed approach was validated under various racing circumstances in an official simulator of the Indy Autonomous Challenge. The experimental results show that the proposed method can effectively overtake competitors, while driving through the track as quickly as possible without collisions.