 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResilient Navigation and Path Planning System for High-speed Autonomous Race Car
Paper and Code
Jul 25, 2022
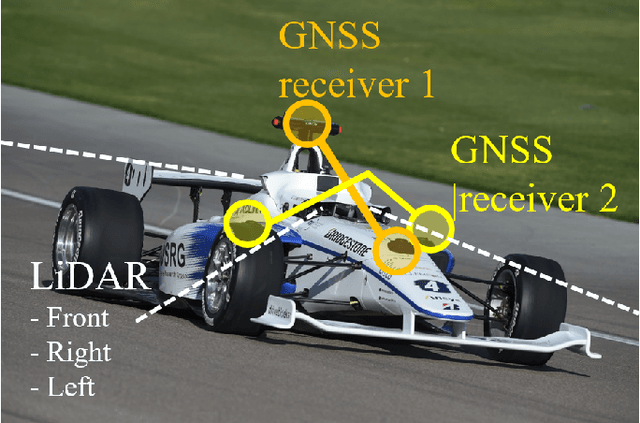
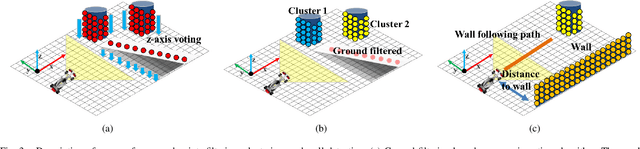
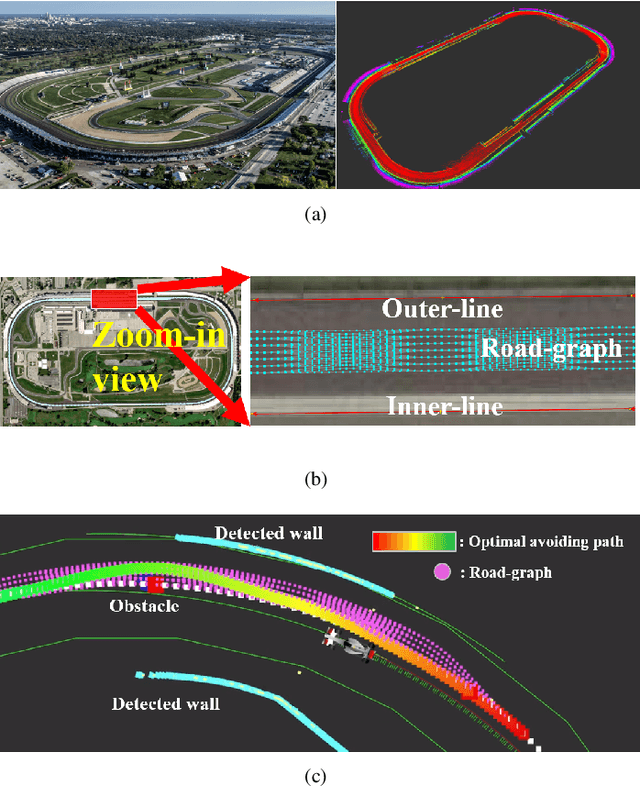
This paper describes resilient navigation and planning algorithm for high-speed autonomous race, Indy Autonomous Challenge (IAC). The IAC is a competition with full-scale autonomous race car that can drive up to 290 km/h(180mph). Due to its high-speed and heavy vibration of the race car, GPS/INS system is prone to be degraded. These degraded GPS measurements can cause a critical localization error leading to a serious crashing accidents. To this end, we propose a robust navigation system to implement multi-sensor fusion Kalman filter. In this study, we present how to identify the degradation of measurement based on probabilistic approaches. Based on this approach, we could compute optimal measurement values for Kalman filter correction step. At the same time, we present the other resilient navigation system so that race car can follow the race track in fatal localization failure situations. In addition, this paper also covers the optimal path planning algorithm for obstacle avoidance. To take account for original optimal racing line, obstacles, vehicle dynamics, we propose a road-graph-based path planning algorithm to guarantee our race car drives in-bounded conditions. In the experiments, we will evaluate our designed localization system can handle the degraded data, and sometimes prevent serious crashing accidents while high-speed driving. In addition, we will describe how we successfully completed the obstacle avoidance challenge.