 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal camera-robot pose estimation in linear time from points and lines
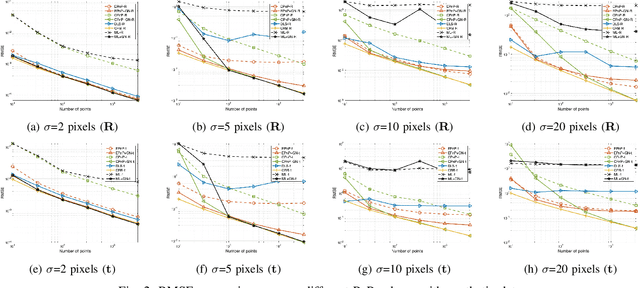
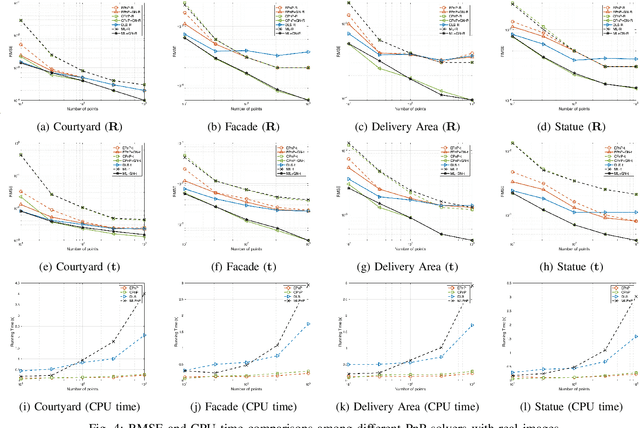
Jul 23, 2024Camera pose estimation is a fundamental problem in robotics. This paper focuses on two issues of interest: First, point and line features have complementary advantages, and it is of great value to design a uniform algorithm that can fuse them effectively; Second, with the development of modern front-end techniques, a large number of features can exist in a single image, which presents a potential for highly accurate robot pose estimation. With these observations, we propose AOPnP(L), an optimal linear-time camera-robot pose estimation algorithm from points and lines. Specifically, we represent a line with two distinct points on it and unify the noise model for point and line measurements where noises are added to 2D points in the image. By utilizing Plucker coordinates for line parameterization, we formulate a maximum likelihood (ML) problem for combined point and line measurements. To optimally solve the ML problem, AOPnP(L) adopts a two-step estimation scheme. In the first step, a consistent estimate that can converge to the true pose is devised by virtue of bias elimination. In the second step, a single Gauss-Newton iteration is executed to refine the initial estimate. AOPnP(L) features theoretical optimality in the sense that its mean squared error converges to the Cramer-Rao lower bound. Moreover, it owns a linear time complexity. These properties make it well-suited for precision-demanding and real-time robot pose estimation. Extensive experiments are conducted to validate our theoretical developments and demonstrate the superiority of AOPnP(L) in both static localization and dynamic odometry systems.
Consistent and Asymptotically Statistically-Efficient Solution to Camera Motion Estimation
Mar 02, 2024Given 2D point correspondences between an image pair, inferring the camera motion is a fundamental issue in the computer vision community. The existing works generally set out from the epipolar constraint and estimate the essential matrix, which is not optimal in the maximum likelihood (ML) sense. In this paper, we dive into the original measurement model with respect to the rotation matrix and normalized translation vector and formulate the ML problem. We then propose a two-step algorithm to solve it: In the first step, we estimate the variance of measurement noises and devise a consistent estimator based on bias elimination; In the second step, we execute a one-step Gauss-Newton iteration on manifold to refine the consistent estimate. We prove that the proposed estimate owns the same asymptotic statistical properties as the ML estimate: The first is consistency, i.e., the estimate converges to the ground truth as the point number increases; The second is asymptotic efficiency, i.e., the mean squared error of the estimate converges to the theoretical lower bound -- Cramer-Rao bound. In addition, we show that our algorithm has linear time complexity. These appealing characteristics endow our estimator with a great advantage in the case of dense point correspondences. Experiments on both synthetic data and real images demonstrate that when the point number reaches the order of hundreds, our estimator outperforms the state-of-the-art ones in terms of estimation accuracy and CPU time.
Consistent and Asymptotically Efficient Localization from Range-Difference Measurements
Feb 10, 2023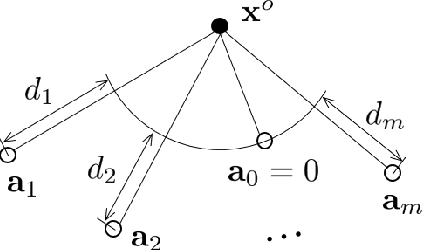
We consider signal source localization from range-difference measurements. First, we give some readily-checked conditions on measurement noises and sensor deployment to guarantee the asymptotic identifiability of the model and show the consistency and asymptotic normality of the maximum likelihood (ML) estimator. Then, we devise an estimator that owns the same asymptotic property as the ML one. Specifically, we prove that the negative log-likelihood function converges to a function, which has a unique minimum and positive-definite Hessian at the true source's position. Hence, it is promising to execute local iterations, e.g., the Gauss-Newton (GN) algorithm, following a consistent estimate. The main issue involved is obtaining a preliminary consistent estimate. To this aim, we construct a linear least-squares problem via algebraic operation and constraint relaxation and obtain a closed-form solution. We then focus on deriving and eliminating the bias of the linear least-squares estimator, which yields an asymptotically unbiased (thus consistent) estimate. Noting that the bias is a function of the noise variance, we further devise a consistent noise variance estimator which involves $3$-order polynomial rooting. Based on the preliminary consistent location estimate, we prove that a one-step GN iteration suffices to achieve the same asymptotic property as the ML estimator. Simulation results demonstrate the superiority of our proposed algorithm in the large sample case.
Efficient Planar Pose Estimation via UWB Measurements
Sep 15, 2022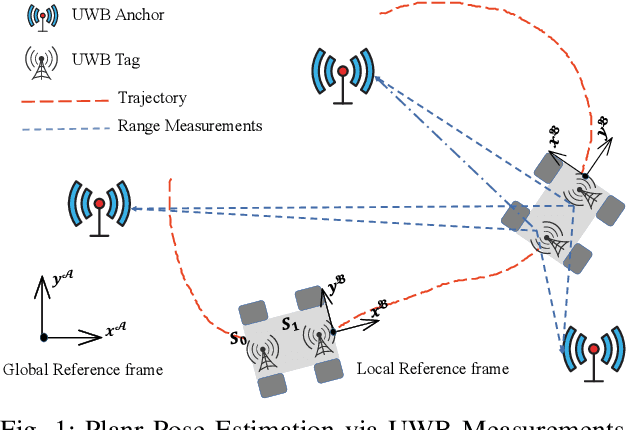
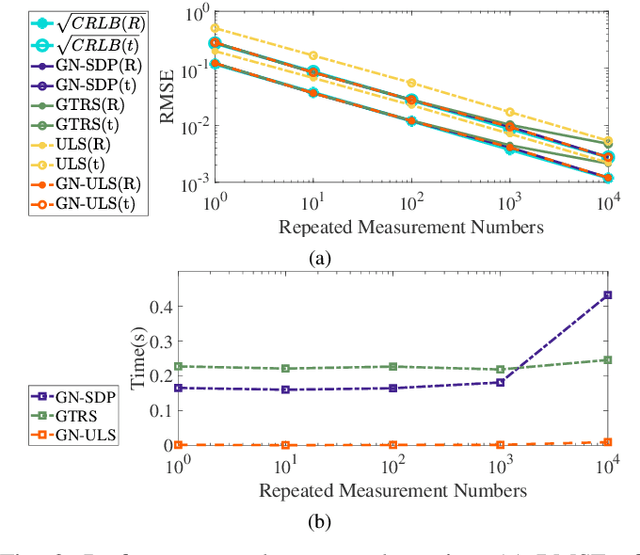
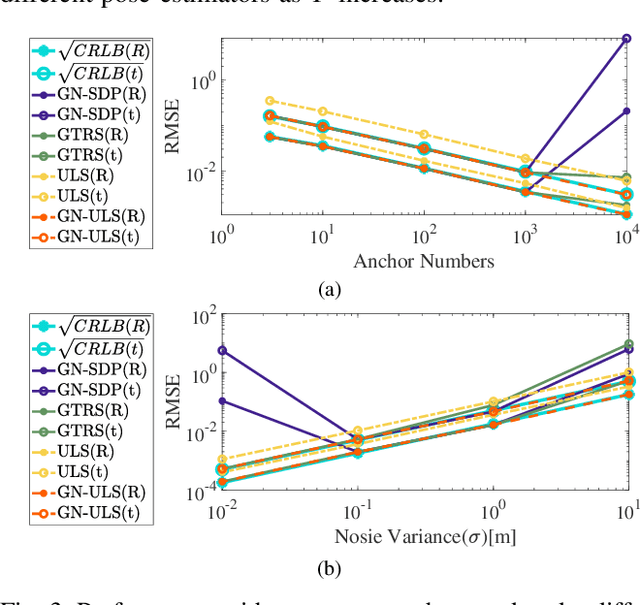
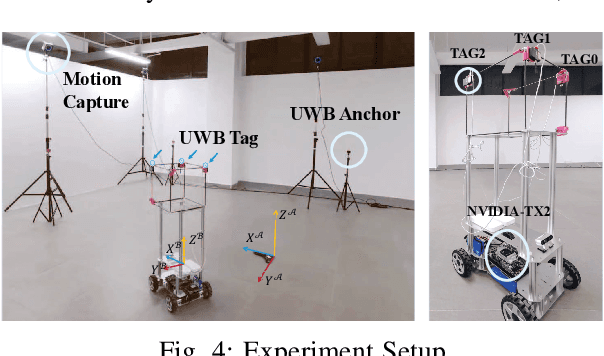
State estimation is an essential part of autonomous systems. Integrating the Ultra-Wideband(UWB) technique has been shown to correct the long-term estimation drift and bypass the complexity of loop closure detection. However, few works on robotics adopt UWB as a stand-alone state estimation solution. The primary purpose of this work is to investigate planar pose estimation using only UWB range measurements and study the estimator's statistical efficiency. We prove the excellent property of a two-step scheme, which says that we can refine a consistent estimator to be asymptotically efficient by one step of Gauss-Newton iteration. Grounded on this result, we design the GN-ULS estimator and evaluate it through simulations and collected datasets. GN-ULS attains millimeter and sub-degree level accuracy on our static datasets and attains centimeter and degree level accuracy on our dynamic datasets, presenting the possibility of using only UWB for real-time state estimation.
CPnP: Consistent Pose Estimator for Perspective-n-Point Problem with Bias Elimination
Sep 13, 2022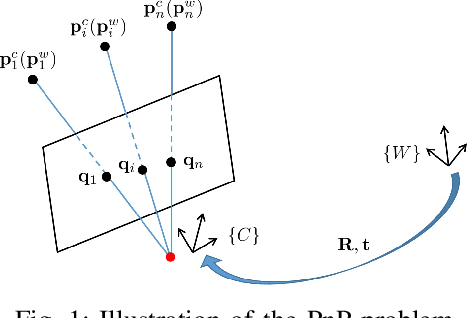

The Perspective-n-Point (PnP) problem has been widely studied in both computer vision and photogrammetry societies. With the development of feature extraction techniques, a large number of feature points might be available in a single shot. It is promising to devise a consistent estimator, i.e., the estimate can converge to the true camera pose as the number of points increases. To this end, we propose a consistent PnP solver, named \emph{CPnP}, with bias elimination. Specifically, linear equations are constructed from the original projection model via measurement model modification and variable elimination, based on which a closed-form least-squares solution is obtained. We then analyze and subtract the asymptotic bias of this solution, resulting in a consistent estimate. Additionally, Gauss-Newton (GN) iterations are executed to refine the consistent solution. Our proposed estimator is efficient in terms of computations -- it has $O(n)$ computational complexity. Experimental tests on both synthetic data and real images show that our proposed estimator is superior to some well-known ones for images with dense visual features, in terms of estimation precision and computing time.
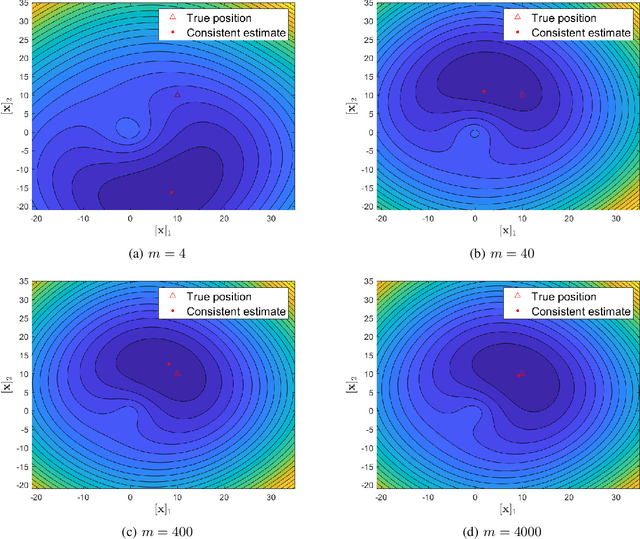
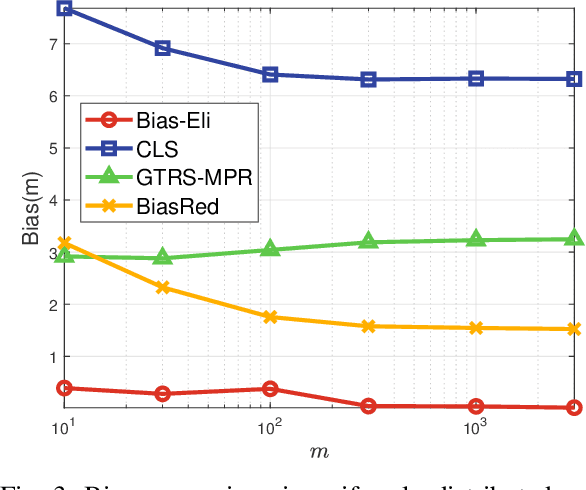
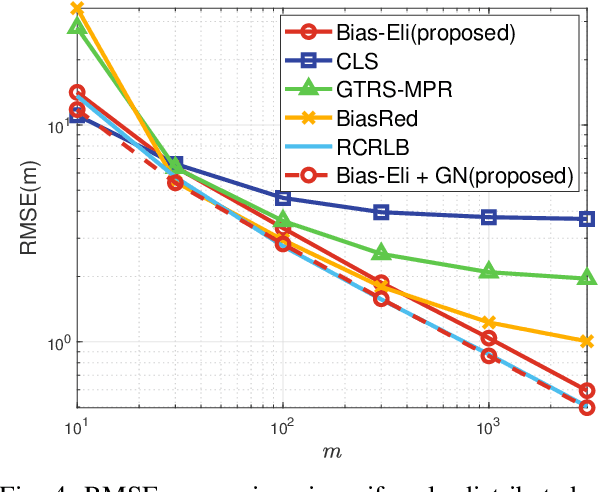
Global and Asymptotically Efficient Localization from Range Measurements
Apr 02, 2022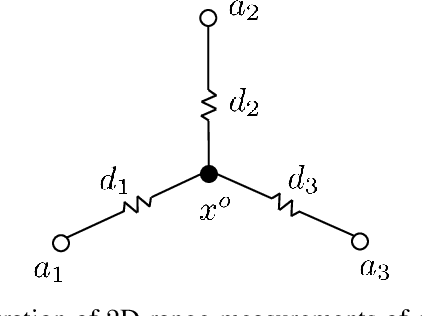
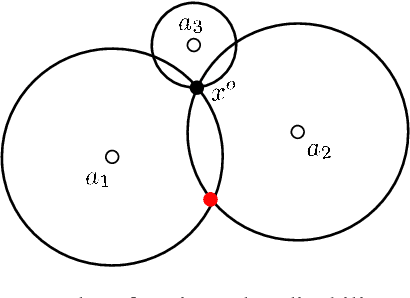
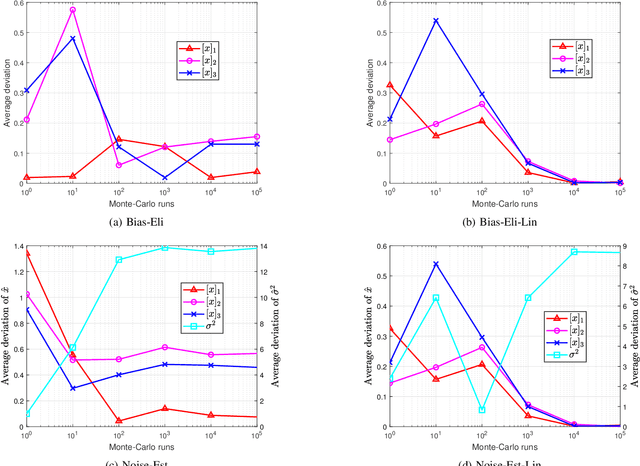
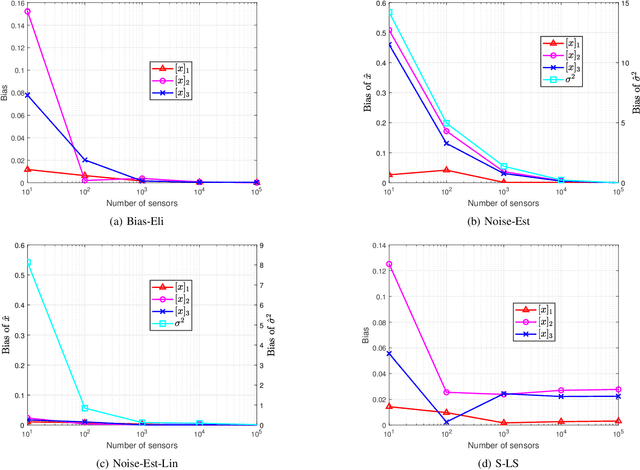
We consider the range-based localization problem, which involves estimating an object's position by using $m$ sensors, hoping that as the number $m$ of sensors increases, the estimate converges to the true position with the minimum variance. We show that under some conditions on the sensor deployment and measurement noises, the LS estimator is strongly consistent and asymptotically normal. However, the LS problem is nonsmooth and nonconvex, and therefore hard to solve. We then devise realizable estimators that possess the same asymptotic properties as the LS one. These estimators are based on a two-step estimation architecture, which says that any $\sqrt{m}$-consistent estimate followed by a one-step Gauss-Newton iteration can yield a solution that possesses the same asymptotic property as the LS one. The keypoint of the two-step scheme is to construct a $\sqrt{m}$-consistent estimate in the first step. In terms of whether the variance of measurement noises is known or not, we propose the Bias-Eli estimator (which involves solving a generalized trust region subproblem) and the Noise-Est estimator (which is obtained by solving a convex problem), respectively. Both of them are proved to be $\sqrt{m}$-consistent. Moreover, we show that by discarding the constraints in the above two optimization problems, the resulting closed-form estimators (called Bias-Eli-Lin and Noise-Est-Lin) are also $\sqrt{m}$-consistent. Plenty of simulations verify the correctness of our theoretical claims, showing that the proposed two-step estimators can asymptotically achieve the Cramer-Rao lower bound.