 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Planar Pose Estimation via UWB Measurements
Paper and Code
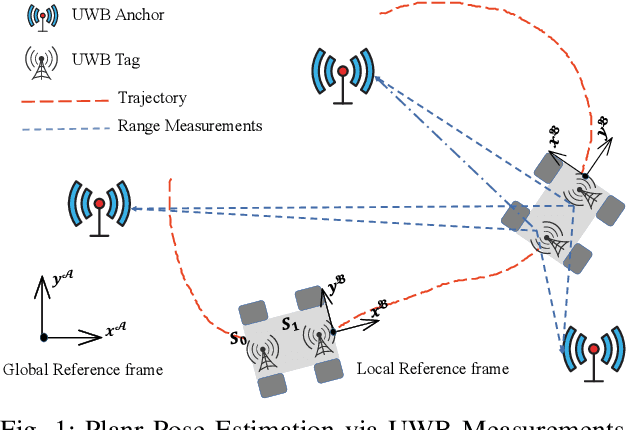
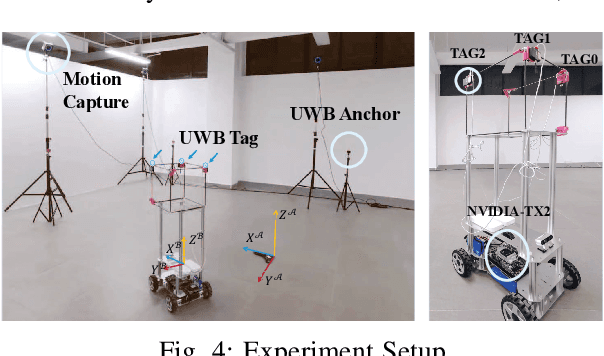
State estimation is an essential part of autonomous systems. Integrating the Ultra-Wideband(UWB) technique has been shown to correct the long-term estimation drift and bypass the complexity of loop closure detection. However, few works on robotics adopt UWB as a stand-alone state estimation solution. The primary purpose of this work is to investigate planar pose estimation using only UWB range measurements and study the estimator's statistical efficiency. We prove the excellent property of a two-step scheme, which says that we can refine a consistent estimator to be asymptotically efficient by one step of Gauss-Newton iteration. Grounded on this result, we design the GN-ULS estimator and evaluate it through simulations and collected datasets. GN-ULS attains millimeter and sub-degree level accuracy on our static datasets and attains centimeter and degree level accuracy on our dynamic datasets, presenting the possibility of using only UWB for real-time state estimation.