 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Open-World Mobile Manipulation in Homes: Lessons from the Neurips 2023 HomeRobot Open Vocabulary Mobile Manipulation Challenge
Jul 09, 2024



In order to develop robots that can effectively serve as versatile and capable home assistants, it is crucial for them to reliably perceive and interact with a wide variety of objects across diverse environments. To this end, we proposed Open Vocabulary Mobile Manipulation as a key benchmark task for robotics: finding any object in a novel environment and placing it on any receptacle surface within that environment. We organized a NeurIPS 2023 competition featuring both simulation and real-world components to evaluate solutions to this task. Our baselines on the most challenging version of this task, using real perception in simulation, achieved only an 0.8% success rate; by the end of the competition, the best participants achieved an 10.8\% success rate, a 13x improvement. We observed that the most successful teams employed a variety of methods, yet two common threads emerged among the best solutions: enhancing error detection and recovery, and improving the integration of perception with decision-making processes. In this paper, we detail the results and methodologies used, both in simulation and real-world settings. We discuss the lessons learned and their implications for future research. Additionally, we compare performance in real and simulated environments, emphasizing the necessity for robust generalization to novel settings.
Taking Recoveries to Task: Recovery-Driven Development for Recipe-based Robot Tasks
Jan 28, 2020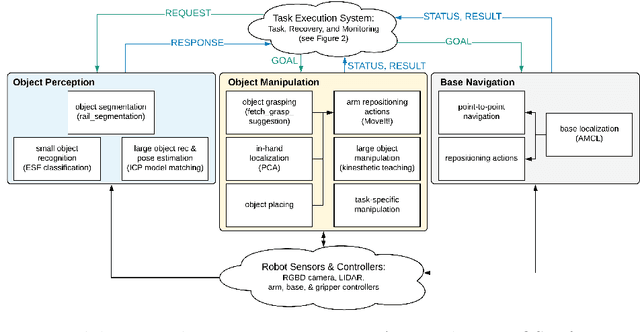
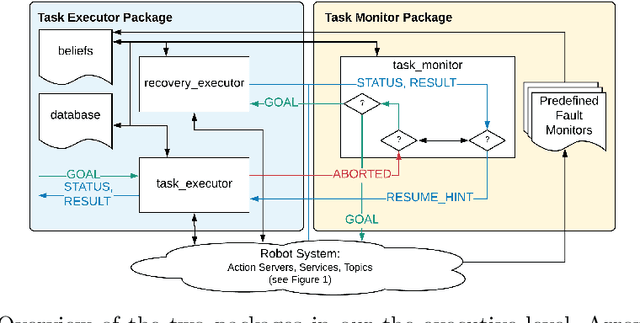

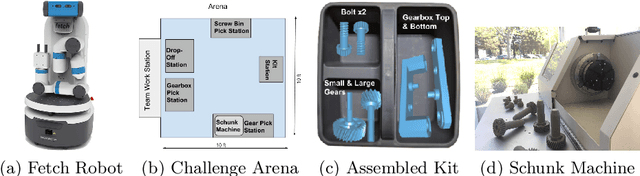
Robot task execution when situated in real-world environments is fragile. As such, robot architectures must rely on robust error recovery, adding non-trivial complexity to highly-complex robot systems. To handle this complexity in development, we introduce Recovery-Driven Development (RDD), an iterative task scripting process that facilitates rapid task and recovery development by leveraging hierarchical specification, separation of nominal task and recovery development, and situated testing. We validate our approach with our challenge-winning mobile manipulator software architecture developed using RDD for the FetchIt! Challenge at the IEEE 2019 International Conference on Robotics and Automation. We attribute the success of our system to the level of robustness achieved using RDD, and conclude with lessons learned for developing such systems.