 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSHELS: Exclusive Feature Sets for Novelty Detection and Continual Learning Without Class Boundaries
Jun 28, 2022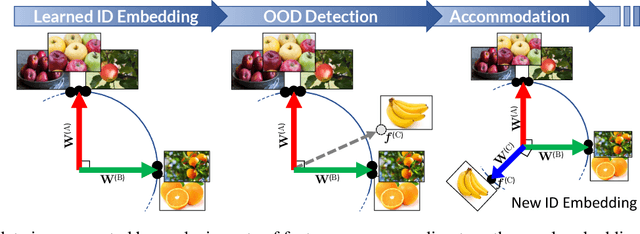
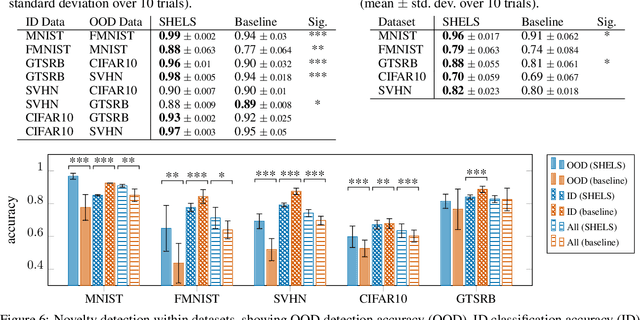
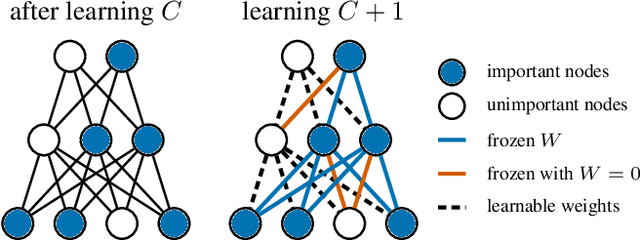
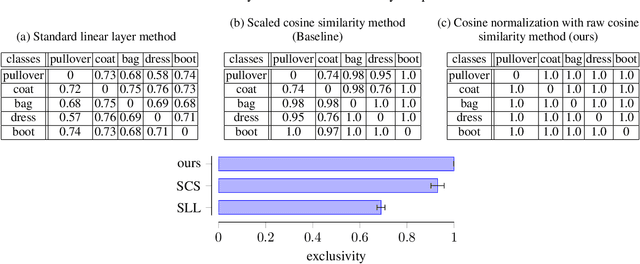
While deep neural networks (DNNs) have achieved impressive classification performance in closed-world learning scenarios, they typically fail to generalize to unseen categories in dynamic open-world environments, in which the number of concepts is unbounded. In contrast, human and animal learners have the ability to incrementally update their knowledge by recognizing and adapting to novel observations. In particular, humans characterize concepts via exclusive (unique) sets of essential features, which are used for both recognizing known classes and identifying novelty. Inspired by natural learners, we introduce a Sparse High-level-Exclusive, Low-level-Shared feature representation (SHELS) that simultaneously encourages learning exclusive sets of high-level features and essential, shared low-level features. The exclusivity of the high-level features enables the DNN to automatically detect out-of-distribution (OOD) data, while the efficient use of capacity via sparse low-level features permits accommodating new knowledge. The resulting approach uses OOD detection to perform class-incremental continual learning without known class boundaries. We show that using SHELS for novelty detection results in statistically significant improvements over state-of-the-art OOD detection approaches over a variety of benchmark datasets. Further, we demonstrate that the SHELS model mitigates catastrophic forgetting in a class-incremental learning setting,enabling a combined novelty detection and accommodation framework that supports learning in open-world settings
Anticipatory Human-Robot Collaboration via Multi-Objective Trajectory Optimization
Jun 05, 2020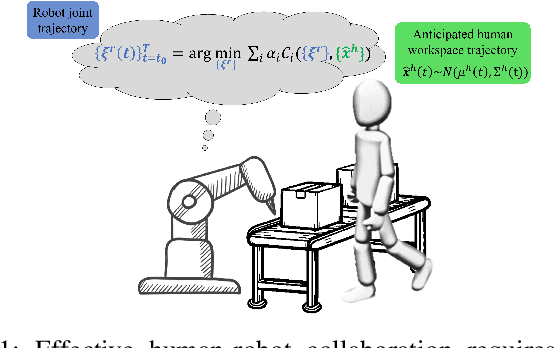
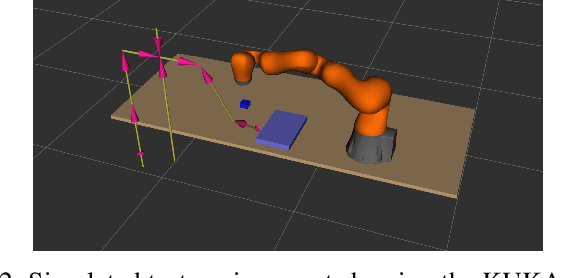
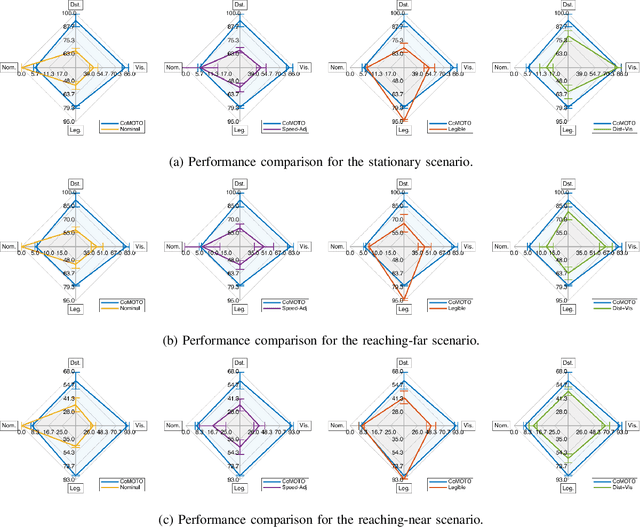
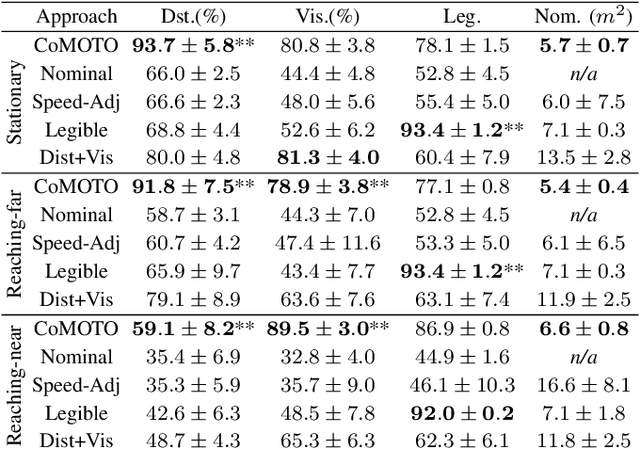
We address the problem of adapting robot trajectories to improve safety, comfort, and efficiency in human-robot collaborative tasks. To this end, we propose CoMOTO, a trajectory optimization framework that utilizes stochastic motion prediction models to anticipate the human's motion and adapt the robot's joint trajectory accordingly. We design a multi-objective cost function that simultaneously optimizes for i) separation distance, ii) visibility of the end-effector, iii) legibility, iv) efficiency, and v) smoothness. We evaluate CoMOTO against three existing methods for robot trajectory generation when in close proximity to humans. Our experimental results indicate that our approach consistently outperforms existing methods over a combined set of safety, comfort, and efficiency metrics.
Human-Centric Active Perception for Autonomous Observation
May 29, 2020
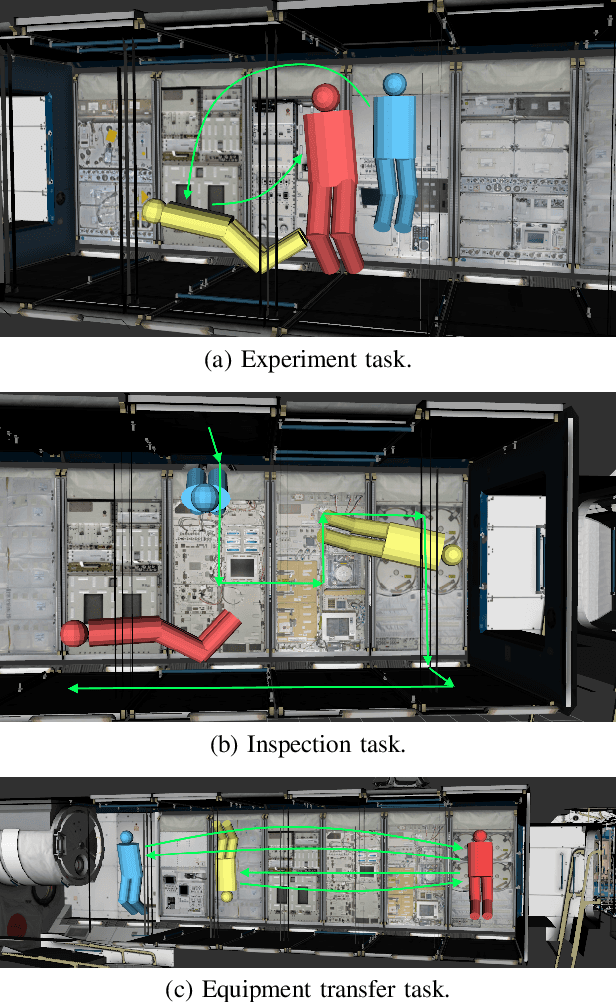
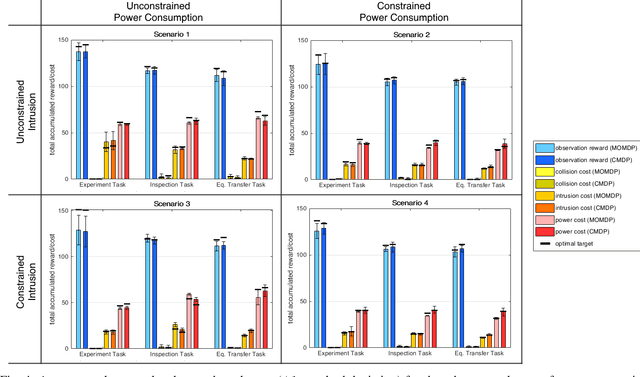
As robot autonomy improves, robots are increasingly being considered in the role of autonomous observation systems -- free-flying cameras capable of actively tracking human activity within some predefined area of interest. In this work, we formulate the autonomous observation problem through multi-objective optimization, presenting a novel Semi-MDP formulation of the autonomous human observation problem that maximizes observation rewards while accounting for both human- and robot-centric costs. We demonstrate that the problem can be solved with both scalarization-based Multi-Objective MDP methods and Constrained MDP methods, and discuss the relative benefits of each approach. We validate our work on activity tracking using a NASA Astrobee robot operating within a simulated International Space Station environment.
Taking Recoveries to Task: Recovery-Driven Development for Recipe-based Robot Tasks
Jan 28, 2020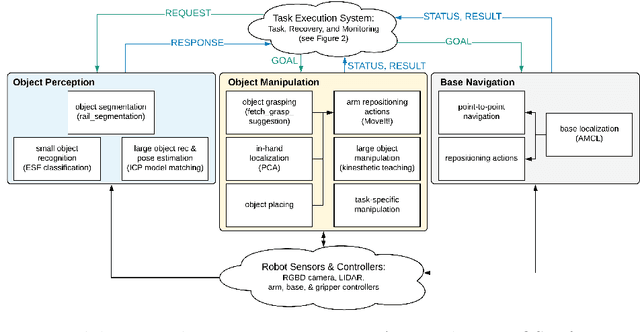
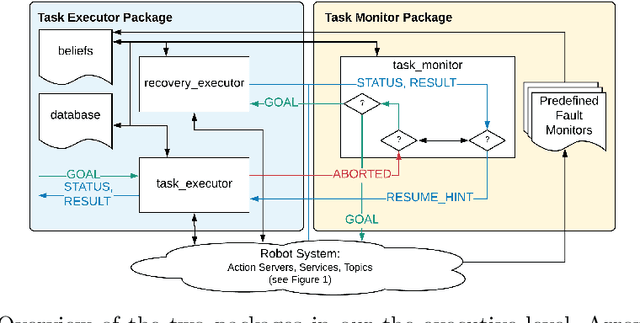

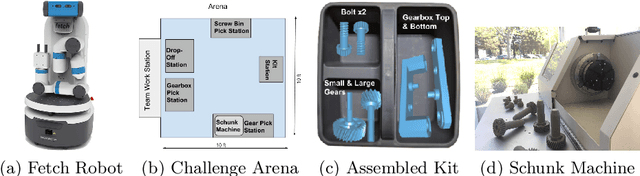
Robot task execution when situated in real-world environments is fragile. As such, robot architectures must rely on robust error recovery, adding non-trivial complexity to highly-complex robot systems. To handle this complexity in development, we introduce Recovery-Driven Development (RDD), an iterative task scripting process that facilitates rapid task and recovery development by leveraging hierarchical specification, separation of nominal task and recovery development, and situated testing. We validate our approach with our challenge-winning mobile manipulator software architecture developed using RDD for the FetchIt! Challenge at the IEEE 2019 International Conference on Robotics and Automation. We attribute the success of our system to the level of robustness achieved using RDD, and conclude with lessons learned for developing such systems.