 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteractive Perception: Leveraging Action in Perception and Perception in Action
Dec 06, 2017
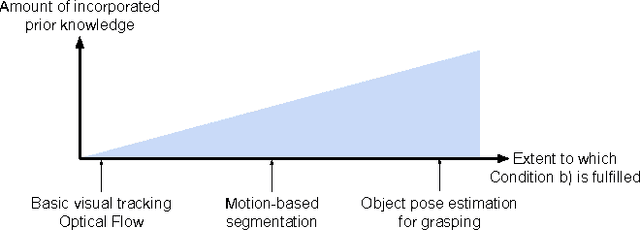
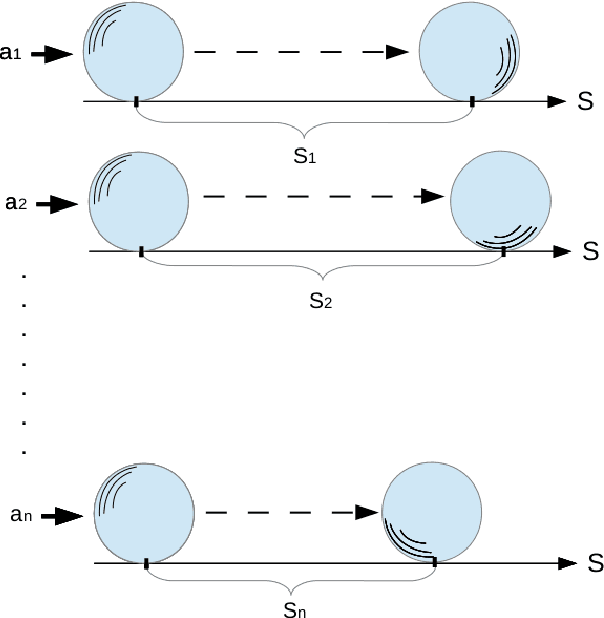
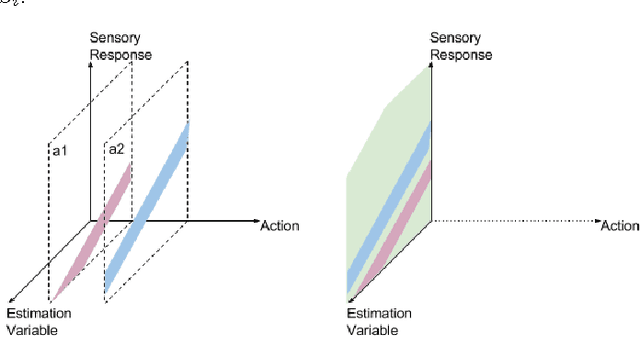
Recent approaches in robotics follow the insight that perception is facilitated by interaction with the environment. These approaches are subsumed under the term of Interactive Perception (IP). It provides the following benefits: (i) interaction with the environment creates a rich sensory signal that would otherwise not be present and (ii) knowledge of the regularity in the combined space of sensory data and action parameters facilitate the prediction and interpretation of the signal. In this survey we postulate this as a principle and collect evidence in support by analyzing and categorizing existing work in this area. We also provide an overview of the most important applications of Interactive Perception. We close this survey by discussing remaining open questions. Thereby, we hope to define a field and inspire future work.
* Equal contribution by first three authors
Policy Learning with Hypothesis based Local Action Selection
May 08, 2015

For robots to be able to manipulate in unknown and unstructured environments the robot should be capable of operating under partial observability of the environment. Object occlusions and unmodeled environments are some of the factors that result in partial observability. A common scenario where this is encountered is manipulation in clutter. In the case that the robot needs to locate an object of interest and manipulate it, it needs to perform a series of decluttering actions to accurately detect the object of interest. To perform such a series of actions, the robot also needs to account for the dynamics of objects in the environment and how they react to contact. This is a non trivial problem since one needs to reason not only about robot-object interactions but also object-object interactions in the presence of contact. In the example scenario of manipulation in clutter, the state vector would have to account for the pose of the object of interest and the structure of the surrounding environment. The process model would have to account for all the aforementioned robot-object, object-object interactions. The complexity of the process model grows exponentially as the number of objects in the scene increases. This is commonly the case in unstructured environments. Hence it is not reasonable to attempt to model all object-object and robot-object interactions explicitly. Under this setting we propose a hypothesis based action selection algorithm where we construct a hypothesis set of the possible poses of an object of interest given the current evidence in the scene and select actions based on our current set of hypothesis. This hypothesis set tends to represent the belief about the structure of the environment and the number of poses the object of interest can take. The agent's only stopping criterion is when the uncertainty regarding the pose of the object is fully resolved.
Learning and Optimization with Submodular Functions
May 07, 2015
In many naturally occurring optimization problems one needs to ensure that the definition of the optimization problem lends itself to solutions that are tractable to compute. In cases where exact solutions cannot be computed tractably, it is beneficial to have strong guarantees on the tractable approximate solutions. In order operate under these criterion most optimization problems are cast under the umbrella of convexity or submodularity. In this report we will study design and optimization over a common class of functions called submodular functions. Set functions, and specifically submodular set functions, characterize a wide variety of naturally occurring optimization problems, and the property of submodularity of set functions has deep theoretical consequences with wide ranging applications. Informally, the property of submodularity of set functions concerns the intuitive "principle of diminishing returns. This property states that adding an element to a smaller set has more value than adding it to a larger set. Common examples of submodular monotone functions are entropies, concave functions of cardinality, and matroid rank functions; non-monotone examples include graph cuts, network flows, and mutual information. In this paper we will review the formal definition of submodularity; the optimization of submodular functions, both maximization and minimization; and finally discuss some applications in relation to learning and reasoning using submodular functions.
Nonmyopic View Planning for Active Object Detection
Sep 20, 2013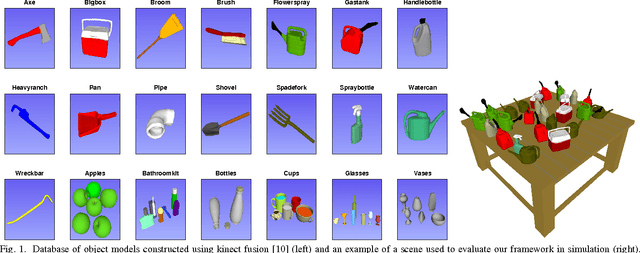
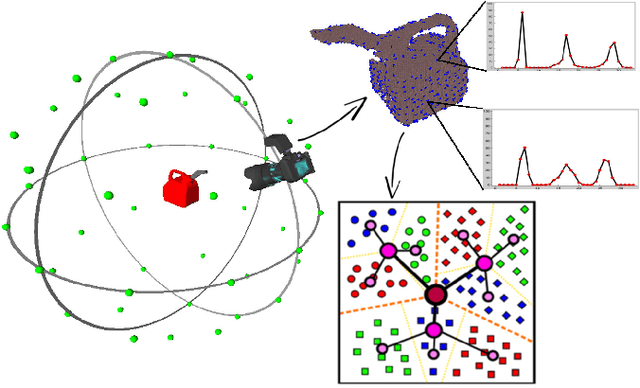
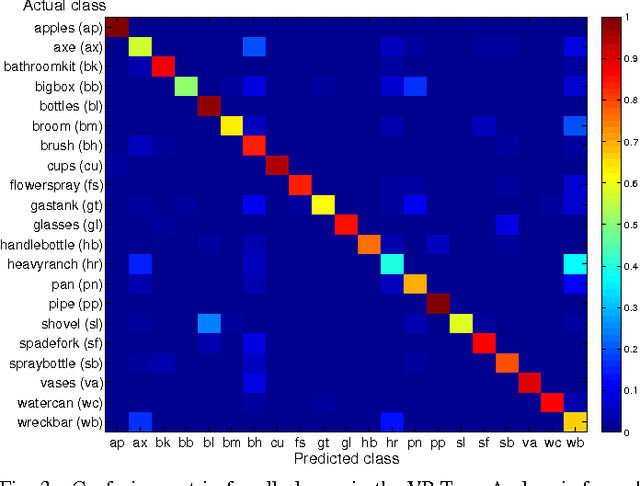
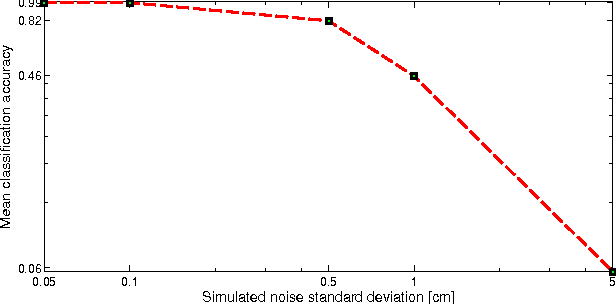
One of the central problems in computer vision is the detection of semantically important objects and the estimation of their pose. Most of the work in object detection has been based on single image processing and its performance is limited by occlusions and ambiguity in appearance and geometry. This paper proposes an active approach to object detection by controlling the point of view of a mobile depth camera. When an initial static detection phase identifies an object of interest, several hypotheses are made about its class and orientation. The sensor then plans a sequence of views, which balances the amount of energy used to move with the chance of identifying the correct hypothesis. We formulate an active hypothesis testing problem, which includes sensor mobility, and solve it using a point-based approximate POMDP algorithm. The validity of our approach is verified through simulation and real-world experiments with the PR2 robot. The results suggest that our approach outperforms the widely-used greedy view point selection and provides a significant improvement over static object detection.