 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonmyopic View Planning for Active Object Detection
Paper and Code
Sep 20, 2013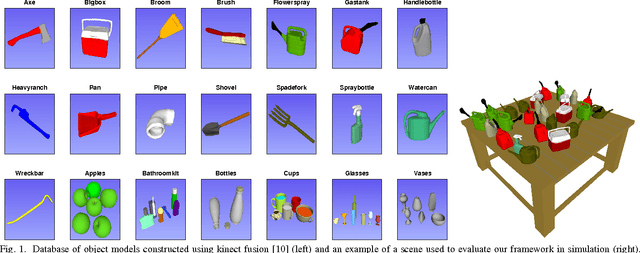
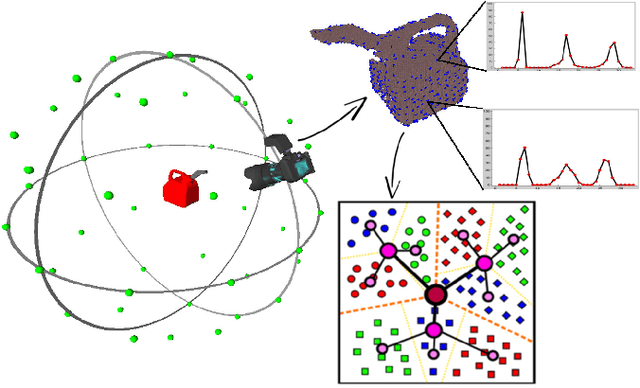
One of the central problems in computer vision is the detection of semantically important objects and the estimation of their pose. Most of the work in object detection has been based on single image processing and its performance is limited by occlusions and ambiguity in appearance and geometry. This paper proposes an active approach to object detection by controlling the point of view of a mobile depth camera. When an initial static detection phase identifies an object of interest, several hypotheses are made about its class and orientation. The sensor then plans a sequence of views, which balances the amount of energy used to move with the chance of identifying the correct hypothesis. We formulate an active hypothesis testing problem, which includes sensor mobility, and solve it using a point-based approximate POMDP algorithm. The validity of our approach is verified through simulation and real-world experiments with the PR2 robot. The results suggest that our approach outperforms the widely-used greedy view point selection and provides a significant improvement over static object detection.