 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePsyAttention: Psychological Attention Model for Personality Detection
Dec 01, 2023Work on personality detection has tended to incorporate psychological features from different personality models, such as BigFive and MBTI. There are more than 900 psychological features, each of which is helpful for personality detection. However, when used in combination, the application of different calculation standards among these features may result in interference between features calculated using distinct systems, thereby introducing noise and reducing performance. This paper adapts different psychological models in the proposed PsyAttention for personality detection, which can effectively encode psychological features, reducing their number by 85%. In experiments on the BigFive and MBTI models, PysAttention achieved average accuracy of 65.66% and 86.30%, respectively, outperforming state-of-the-art methods, indicating that it is effective at encoding psychological features.
NBMOD: Find It and Grasp It in Noisy Background
Jun 17, 2023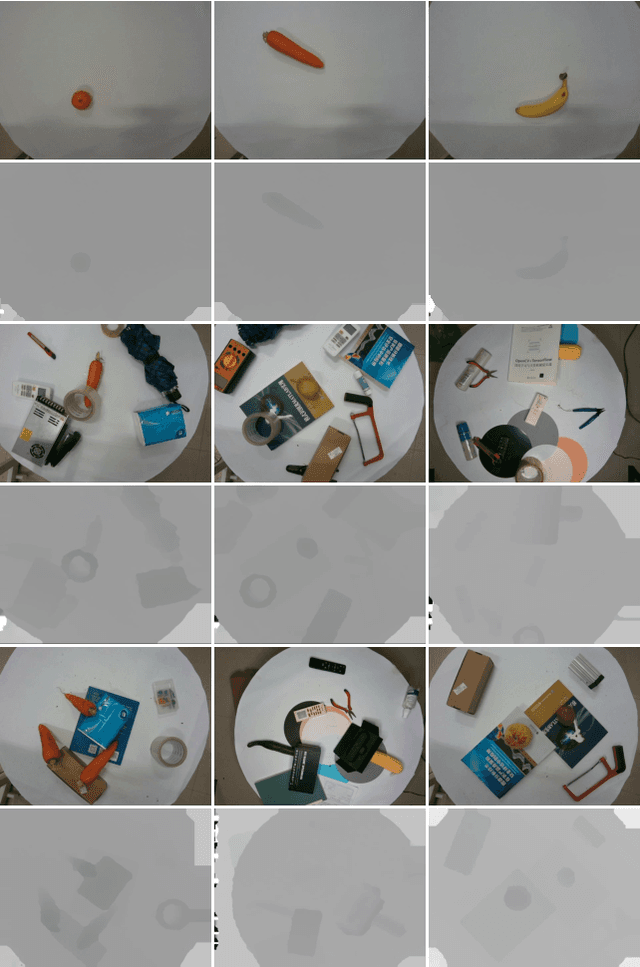
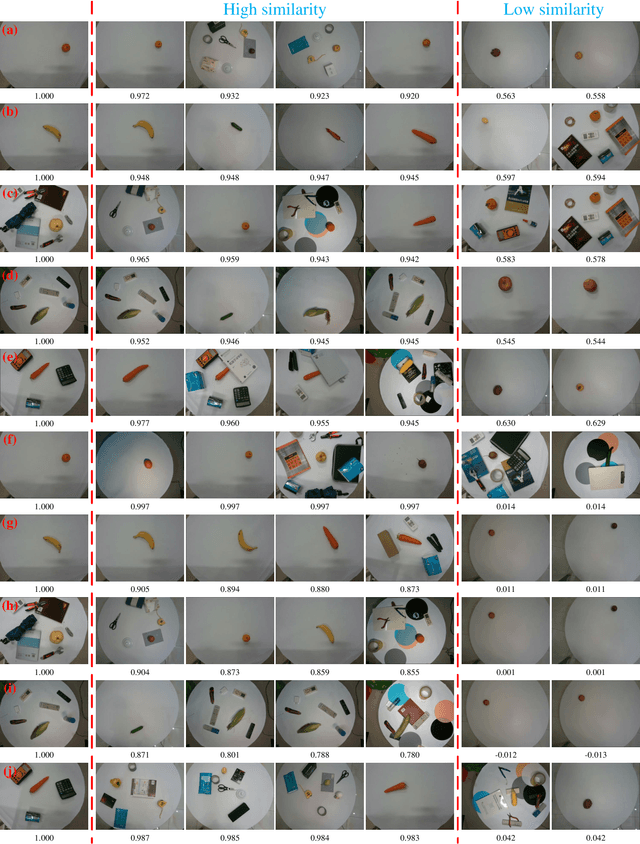
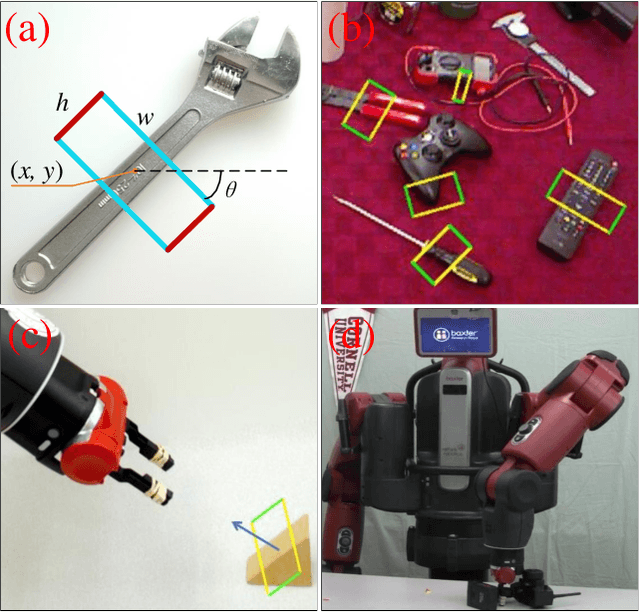

Grasping objects is a fundamental yet important capability of robots, and many tasks such as sorting and picking rely on this skill. The prerequisite for stable grasping is the ability to correctly identify suitable grasping positions. However, finding appropriate grasping points is challenging due to the diverse shapes, varying density distributions, and significant differences between the barycenter of various objects. In the past few years, researchers have proposed many methods to address the above-mentioned issues and achieved very good results on publicly available datasets such as the Cornell dataset and the Jacquard dataset. The problem is that the backgrounds of Cornell and Jacquard datasets are relatively simple - typically just a whiteboard, while in real-world operational environments, the background could be complex and noisy. Moreover, in real-world scenarios, robots usually only need to grasp fixed types of objects. To address the aforementioned issues, we proposed a large-scale grasp detection dataset called NBMOD: Noisy Background Multi-Object Dataset for grasp detection, which consists of 31,500 RGB-D images of 20 different types of fruits. Accurate prediction of angles has always been a challenging problem in the detection task of oriented bounding boxes. This paper presents a Rotation Anchor Mechanism (RAM) to address this issue. Considering the high real-time requirement of robotic systems, we propose a series of lightweight architectures called RA-GraspNet (GraspNet with Rotation Anchor): RARA (network with Rotation Anchor and Region Attention), RAST (network with Rotation Anchor and Semi Transformer), and RAGT (network with Rotation Anchor and Global Transformer) to tackle this problem. Among them, the RAGT-3/3 model achieves an accuracy of 99% on the NBMOD dataset. The NBMOD and our code are available at https://github.com/kmittle/Grasp-Detection-NBMOD.
Enhance-NeRF: Multiple Performance Evaluation for Neural Radiance Fields
Jun 08, 2023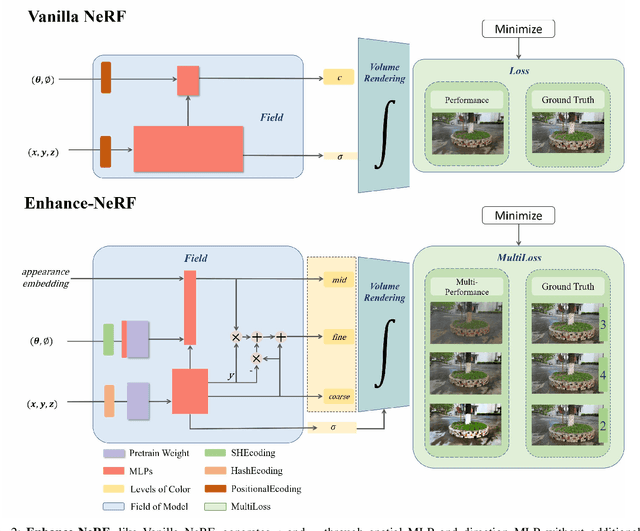
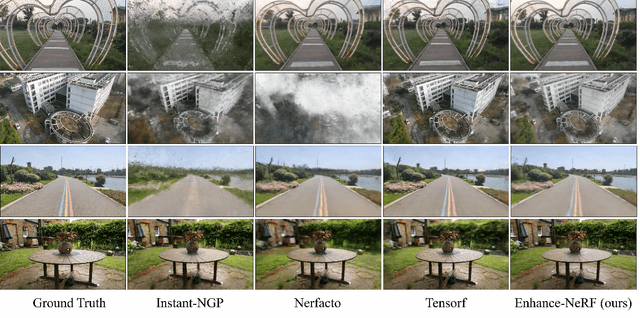
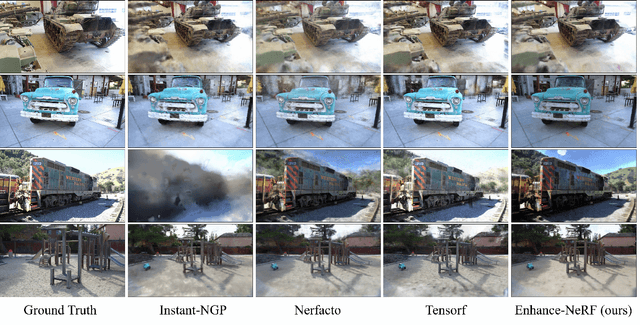
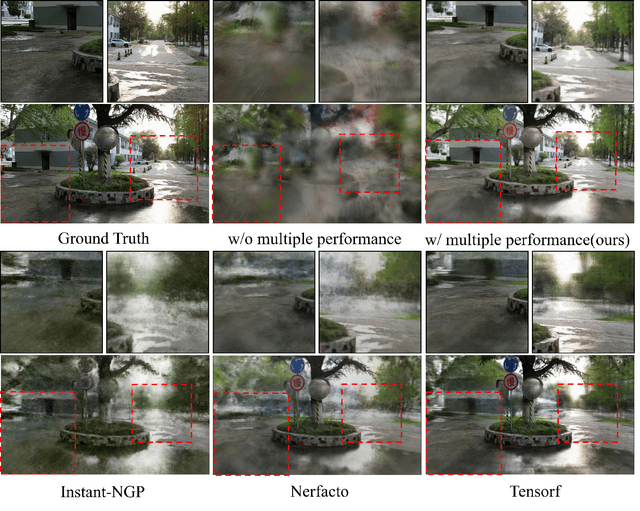
The quality of three-dimensional reconstruction is a key factor affecting the effectiveness of its application in areas such as virtual reality (VR) and augmented reality (AR) technologies. Neural Radiance Fields (NeRF) can generate realistic images from any viewpoint. It simultaneously reconstructs the shape, lighting, and materials of objects, and without surface defects, which breaks down the barrier between virtuality and reality. The potential spatial correspondences displayed by NeRF between reconstructed scenes and real-world scenes offer a wide range of practical applications possibilities. Despite significant progress in 3D reconstruction since NeRF were introduced, there remains considerable room for exploration and experimentation. NeRF-based models are susceptible to interference issues caused by colored "fog" noise. Additionally, they frequently encounter instabilities and failures while attempting to reconstruct unbounded scenes. Moreover, the model takes a significant amount of time to converge, making it even more challenging to use in such scenarios. Our approach, coined Enhance-NeRF, which adopts joint color to balance low and high reflectivity objects display, utilizes a decoding architecture with prior knowledge to improve recognition, and employs multi-layer performance evaluation mechanisms to enhance learning capacity. It achieves reconstruction of outdoor scenes within one hour under single-card condition. Based on experimental results, Enhance-NeRF partially enhances fitness capability and provides some support to outdoor scene reconstruction. The Enhance-NeRF method can be used as a plug-and-play component, making it easy to integrate with other NeRF-based models. The code is available at: https://github.com/TANQIanQ/Enhance-NeRF
Enhancing Unsupervised Anomaly Detection with Score-Guided Network
Sep 10, 2021



Anomaly detection plays a crucial role in various real-world applications, including healthcare and finance systems. Owing to the limited number of anomaly labels in these complex systems, unsupervised anomaly detection methods have attracted great attention in recent years. Two major challenges faced by the existing unsupervised methods are: (i) distinguishing between normal and abnormal data in the transition field, where normal and abnormal data are highly mixed together; (ii) defining an effective metric to maximize the gap between normal and abnormal data in a hypothesis space, which is built by a representation learner. To that end, this work proposes a novel scoring network with a score-guided regularization to learn and enlarge the anomaly score disparities between normal and abnormal data. With such score-guided strategy, the representation learner can gradually learn more informative representation during the model training stage, especially for the samples in the transition field. We next propose a score-guided autoencoder (SG-AE), incorporating the scoring network into an autoencoder framework for anomaly detection, as well as other three state-of-the-art models, to further demonstrate the effectiveness and transferability of the design. Extensive experiments on both synthetic and real-world datasets demonstrate the state-of-the-art performance of these score-guided models (SGMs).
Restrained Generative Adversarial Network against Overfitting in Numeric Data Augmentation
Oct 26, 2020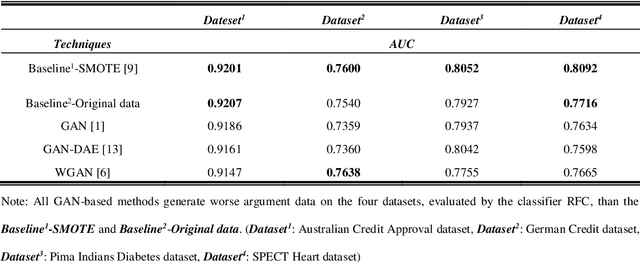
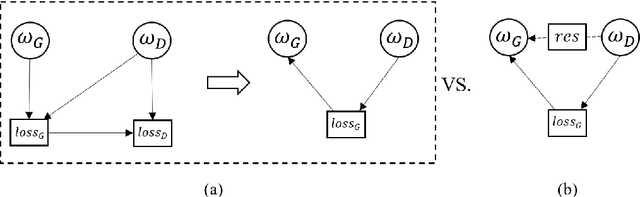
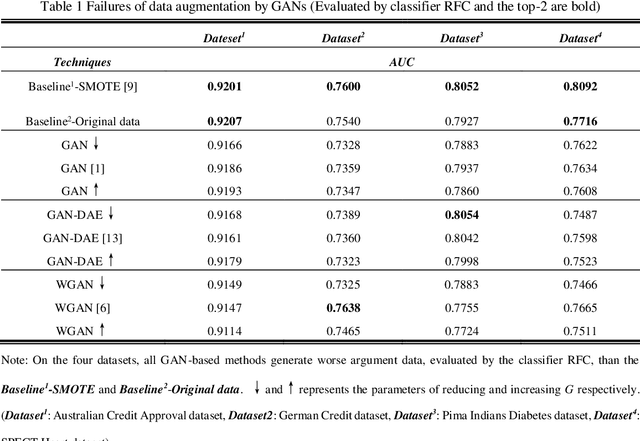

In recent studies, Generative Adversarial Network (GAN) is one of the popular schemes to augment the image dataset. However, in our study we find the generator G in the GAN fails to generate numerical data in lower-dimensional spaces, and we address overfitting in the generation. By analyzing the Directed Graphical Model (DGM), we propose a theoretical restraint, independence on the loss function, to suppress the overfitting. Practically, as the Statically Restrained GAN (SRGAN) and Dynamically Restrained GAN (DRGAN), two frameworks are proposed to employ the theoretical restraint to the network structure. In the static structure, we predefined a pair of particular network topologies of G and D as the restraint, and quantify such restraint by the interpretable metric Similarity of the Restraint (SR). While for DRGAN we design an adjustable dropout module for the restraint function. In the widely carried out 20 group experiments, on four public numerical class imbalance datasets and five classifiers, the static and dynamic methods together produce the best augmentation results of 19 from 20; and both two methods simultaneously generate 14 of 20 groups of the top-2 best, proving the effectiveness and feasibility of the theoretical restraints.