 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerative Actor Critic
Dec 25, 2025Conventional Reinforcement Learning (RL) algorithms, typically focused on estimating or maximizing expected returns, face challenges when refining offline pretrained models with online experiences. This paper introduces Generative Actor Critic (GAC), a novel framework that decouples sequential decision-making by reframing \textit{policy evaluation} as learning a generative model of the joint distribution over trajectories and returns, $p(τ, y)$, and \textit{policy improvement} as performing versatile inference on this learned model. To operationalize GAC, we introduce a specific instantiation based on a latent variable model that features continuous latent plan vectors. We develop novel inference strategies for both \textit{exploitation}, by optimizing latent plans to maximize expected returns, and \textit{exploration}, by sampling latent plans conditioned on dynamically adjusted target returns. Experiments on Gym-MuJoCo and Maze2D benchmarks demonstrate GAC's strong offline performance and significantly enhanced offline-to-online improvement compared to state-of-the-art methods, even in absence of step-wise rewards.
AdaSociety: An Adaptive Environment with Social Structures for Multi-Agent Decision-Making
Nov 06, 2024Traditional interactive environments limit agents' intelligence growth with fixed tasks. Recently, single-agent environments address this by generating new tasks based on agent actions, enhancing task diversity. We consider the decision-making problem in multi-agent settings, where tasks are further influenced by social connections, affecting rewards and information access. However, existing multi-agent environments lack a combination of adaptive physical surroundings and social connections, hindering the learning of intelligent behaviors. To address this, we introduce AdaSociety, a customizable multi-agent environment featuring expanding state and action spaces, alongside explicit and alterable social structures. As agents progress, the environment adaptively generates new tasks with social structures for agents to undertake. In AdaSociety, we develop three mini-games showcasing distinct social structures and tasks. Initial results demonstrate that specific social structures can promote both individual and collective benefits, though current reinforcement learning and LLM-based algorithms show limited effectiveness in leveraging social structures to enhance performance. Overall, AdaSociety serves as a valuable research platform for exploring intelligence in diverse physical and social settings. The code is available at https://github.com/bigai-ai/AdaSociety.
Score Neural Operator: A Generative Model for Learning and Generalizing Across Multiple Probability Distributions
Oct 11, 2024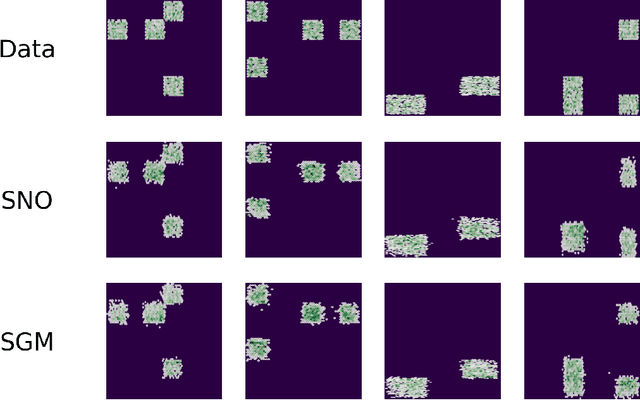
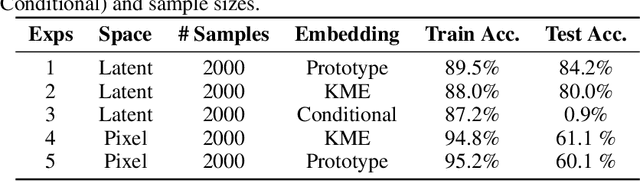
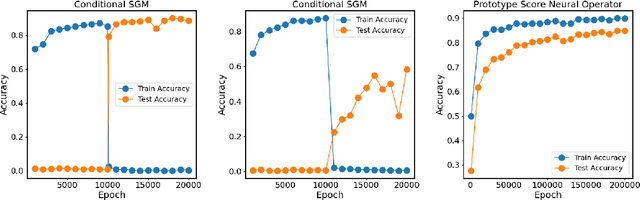
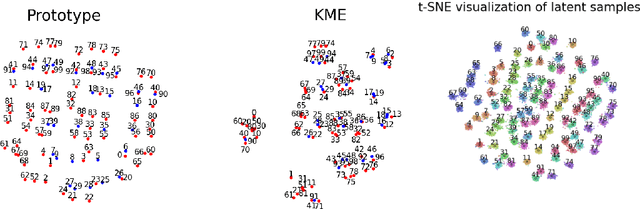
Most existing generative models are limited to learning a single probability distribution from the training data and cannot generalize to novel distributions for unseen data. An architecture that can generate samples from both trained datasets and unseen probability distributions would mark a significant breakthrough. Recently, score-based generative models have gained considerable attention for their comprehensive mode coverage and high-quality image synthesis, as they effectively learn an operator that maps a probability distribution to its corresponding score function. In this work, we introduce the $\emph{Score Neural Operator}$, which learns the mapping from multiple probability distributions to their score functions within a unified framework. We employ latent space techniques to facilitate the training of score matching, which tends to over-fit in the original image pixel space, thereby enhancing sample generation quality. Our trained Score Neural Operator demonstrates the ability to predict score functions of probability measures beyond the training space and exhibits strong generalization performance in both 2-dimensional Gaussian Mixture Models and 1024-dimensional MNIST double-digit datasets. Importantly, our approach offers significant potential for few-shot learning applications, where a single image from a new distribution can be leveraged to generate multiple distinct images from that distribution.
Learning non-Markovian Decision-Making from State-only Sequences
Jul 01, 2023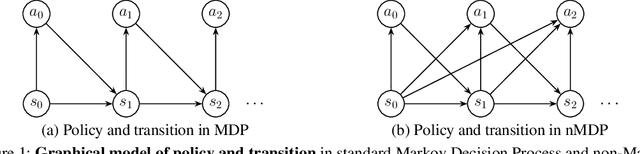
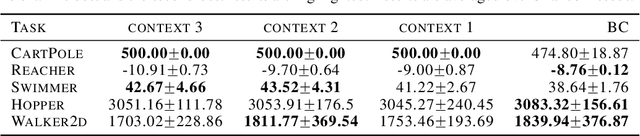
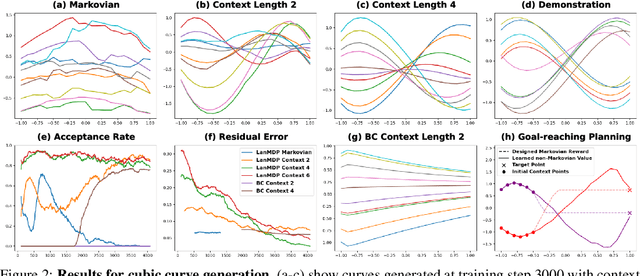

Conventional imitation learning assumes access to the actions of demonstrators, but these motor signals are often non-observable in naturalistic settings. Additionally, sequential decision-making behaviors in these settings can deviate from the assumptions of a standard Markov Decision Process (MDP). To address these challenges, we explore deep generative modeling of state-only sequences with non-Markov Decision Process (nMDP), where the policy is an energy-based prior in the latent space of the state transition generator. We develop maximum likelihood estimation to achieve model-based imitation, which involves short-run MCMC sampling from the prior and importance sampling for the posterior. The learned model enables \textit{decision-making as inference}: model-free policy execution is equivalent to prior sampling, model-based planning is posterior sampling initialized from the policy. We demonstrate the efficacy of the proposed method in a prototypical path planning task with non-Markovian constraints and show that the learned model exhibits strong performances in challenging domains from the MuJoCo suite.