 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCAMNet: Leveraging Cooperative Awareness Messages for Vehicle Trajectory Prediction
Oct 14, 2025

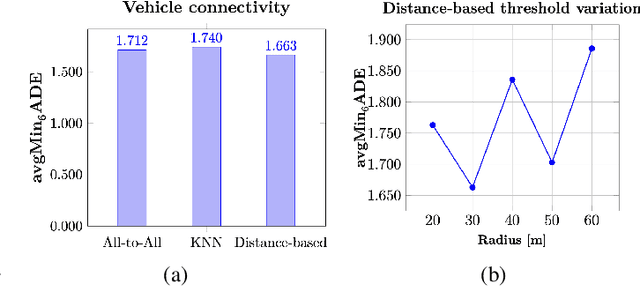
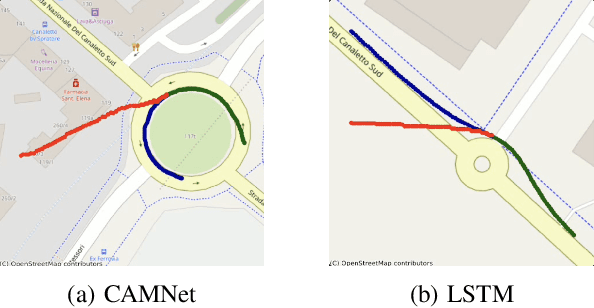
Autonomous driving remains a challenging task, particularly due to safety concerns. Modern vehicles are typically equipped with expensive sensors such as LiDAR, cameras, and radars to reduce the risk of accidents. However, these sensors face inherent limitations: their field of view and line of sight can be obstructed by other vehicles, thereby reducing situational awareness. In this context, vehicle-to-vehicle communication plays a crucial role, as it enables cars to share information and remain aware of each other even when sensors are occluded. One way to achieve this is through the use of Cooperative Awareness Messages (CAMs). In this paper, we investigate the use of CAM data for vehicle trajectory prediction. Specifically, we design and train a neural network, Cooperative Awareness Message-based Graph Neural Network (CAMNet), on a widely used motion forecasting dataset. We then evaluate the model on a second dataset that we created from scratch using Cooperative Awareness Messages, in order to assess whether this type of data can be effectively exploited. Our approach demonstrates promising results, showing that CAMs can indeed support vehicle trajectory prediction. At the same time, we discuss several limitations of the approach, which highlight opportunities for future research.
Update Your Transformer to the Latest Release: Re-Basin of Task Vectors
May 28, 2025Foundation models serve as the backbone for numerous specialized models developed through fine-tuning. However, when the underlying pretrained model is updated or retrained (e.g., on larger and more curated datasets), the fine-tuned model becomes obsolete, losing its utility and requiring retraining. This raises the question: is it possible to transfer fine-tuning to a new release of the model? In this work, we investigate how to transfer fine-tuning to a new checkpoint without having to re-train, in a data-free manner. To do so, we draw principles from model re-basin and provide a recipe based on weight permutations to re-base the modifications made to the original base model, often called task vector. In particular, our approach tailors model re-basin for Transformer models, taking into account the challenges of residual connections and multi-head attention layers. Specifically, we propose a two-level method rooted in spectral theory, initially permuting the attention heads and subsequently adjusting parameters within select pairs of heads. Through extensive experiments on visual and textual tasks, we achieve the seamless transfer of fine-tuned knowledge to new pre-trained backbones without relying on a single training step or datapoint. Code is available at https://github.com/aimagelab/TransFusion.
How to Train Your Metamorphic Deep Neural Network
May 07, 2025



Neural Metamorphosis (NeuMeta) is a recent paradigm for generating neural networks of varying width and depth. Based on Implicit Neural Representation (INR), NeuMeta learns a continuous weight manifold, enabling the direct generation of compressed models, including those with configurations not seen during training. While promising, the original formulation of NeuMeta proves effective only for the final layers of the undelying model, limiting its broader applicability. In this work, we propose a training algorithm that extends the capabilities of NeuMeta to enable full-network metamorphosis with minimal accuracy degradation. Our approach follows a structured recipe comprising block-wise incremental training, INR initialization, and strategies for replacing batch normalization. The resulting metamorphic networks maintain competitive accuracy across a wide range of compression ratios, offering a scalable solution for adaptable and efficient deployment of deep models. The code is available at: https://github.com/TSommariva/HTTY_NeuMeta.
DitHub: A Modular Framework for Incremental Open-Vocabulary Object Detection
Mar 12, 2025Open-Vocabulary object detectors can recognize a wide range of categories using simple textual prompts. However, improving their ability to detect rare classes or specialize in certain domains remains a challenge. While most recent methods rely on a single set of model weights for adaptation, we take a different approach by using modular deep learning. We introduce DitHub, a framework designed to create and manage a library of efficient adaptation modules. Inspired by Version Control Systems, DitHub organizes expert modules like branches that can be fetched and merged as needed. This modular approach enables a detailed study of how adaptation modules combine, making it the first method to explore this aspect in Object Detection. Our approach achieves state-of-the-art performance on the ODinW-13 benchmark and ODinW-O, a newly introduced benchmark designed to evaluate how well models adapt when previously seen classes reappear. For more details, visit our project page: https://aimagelab.github.io/DitHub/
Is Multiple Object Tracking a Matter of Specialization?
Nov 01, 2024



End-to-end transformer-based trackers have achieved remarkable performance on most human-related datasets. However, training these trackers in heterogeneous scenarios poses significant challenges, including negative interference - where the model learns conflicting scene-specific parameters - and limited domain generalization, which often necessitates expensive fine-tuning to adapt the models to new domains. In response to these challenges, we introduce Parameter-efficient Scenario-specific Tracking Architecture (PASTA), a novel framework that combines Parameter-Efficient Fine-Tuning (PEFT) and Modular Deep Learning (MDL). Specifically, we define key scenario attributes (e.g, camera-viewpoint, lighting condition) and train specialized PEFT modules for each attribute. These expert modules are combined in parameter space, enabling systematic generalization to new domains without increasing inference time. Extensive experiments on MOTSynth, along with zero-shot evaluations on MOT17 and PersonPath22 demonstrate that a neural tracker built from carefully selected modules surpasses its monolithic counterpart. We release models and code.
May the Forgetting Be with You: Alternate Replay for Learning with Noisy Labels
Aug 26, 2024Forgetting presents a significant challenge during incremental training, making it particularly demanding for contemporary AI systems to assimilate new knowledge in streaming data environments. To address this issue, most approaches in Continual Learning (CL) rely on the replay of a restricted buffer of past data. However, the presence of noise in real-world scenarios, where human annotation is constrained by time limitations or where data is automatically gathered from the web, frequently renders these strategies vulnerable. In this study, we address the problem of CL under Noisy Labels (CLN) by introducing Alternate Experience Replay (AER), which takes advantage of forgetting to maintain a clear distinction between clean, complex, and noisy samples in the memory buffer. The idea is that complex or mislabeled examples, which hardly fit the previously learned data distribution, are most likely to be forgotten. To grasp the benefits of such a separation, we equip AER with Asymmetric Balanced Sampling (ABS): a new sample selection strategy that prioritizes purity on the current task while retaining relevant samples from the past. Through extensive computational comparisons, we demonstrate the effectiveness of our approach in terms of both accuracy and purity of the obtained buffer, resulting in a remarkable average gain of 4.71% points in accuracy with respect to existing loss-based purification strategies. Code is available at https://github.com/aimagelab/mammoth.
CLIP with Generative Latent Replay: a Strong Baseline for Incremental Learning
Jul 22, 2024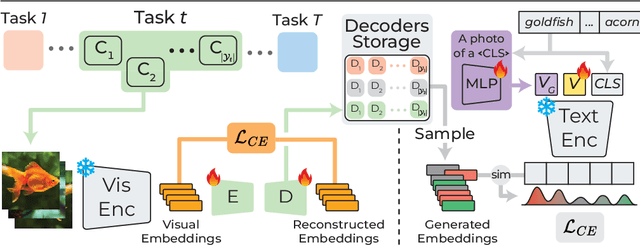
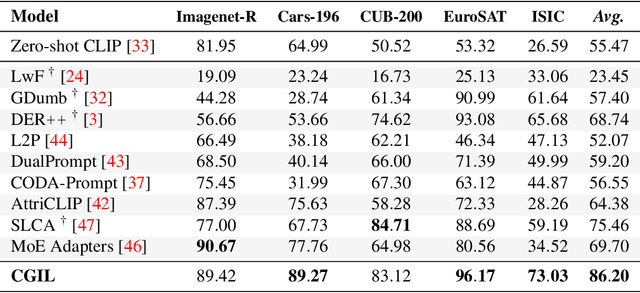
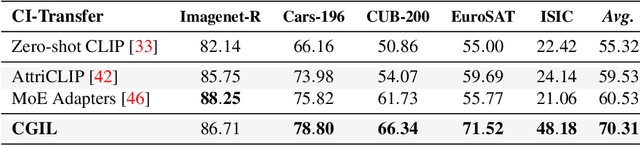
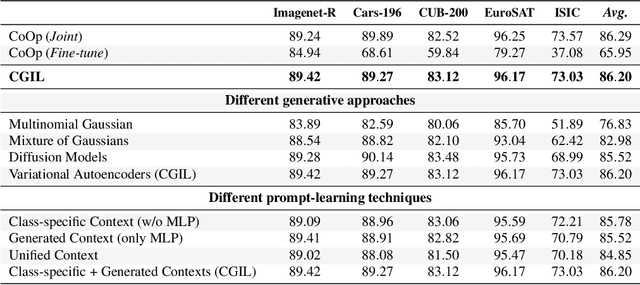
With the emergence of Transformers and Vision-Language Models (VLMs) such as CLIP, large pre-trained models have become a common strategy to enhance performance in Continual Learning scenarios. This led to the development of numerous prompting strategies to effectively fine-tune transformer-based models without succumbing to catastrophic forgetting. However, these methods struggle to specialize the model on domains significantly deviating from the pre-training and preserving its zero-shot capabilities. In this work, we propose Continual Generative training for Incremental prompt-Learning, a novel approach to mitigate forgetting while adapting a VLM, which exploits generative replay to align prompts to tasks. We also introduce a new metric to evaluate zero-shot capabilities within CL benchmarks. Through extensive experiments on different domains, we demonstrate the effectiveness of our framework in adapting to new tasks while improving zero-shot capabilities. Further analysis reveals that our approach can bridge the gap with joint prompt tuning. The codebase is available at https://github.com/aimagelab/mammoth.
An Attention-based Representation Distillation Baseline for Multi-Label Continual Learning
Jul 19, 2024


The field of Continual Learning (CL) has inspired numerous researchers over the years, leading to increasingly advanced countermeasures to the issue of catastrophic forgetting. Most studies have focused on the single-class scenario, where each example comes with a single label. The recent literature has successfully tackled such a setting, with impressive results. Differently, we shift our attention to the multi-label scenario, as we feel it to be more representative of real-world open problems. In our work, we show that existing state-of-the-art CL methods fail to achieve satisfactory performance, thus questioning the real advance claimed in recent years. Therefore, we assess both old-style and novel strategies and propose, on top of them, an approach called Selective Class Attention Distillation (SCAD). It relies on a knowledge transfer technique that seeks to align the representations of the student network -- which trains continuously and is subject to forgetting -- with the teacher ones, which is pretrained and kept frozen. Importantly, our method is able to selectively transfer the relevant information from the teacher to the student, thereby preventing irrelevant information from harming the student's performance during online training. To demonstrate the merits of our approach, we conduct experiments on two different multi-label datasets, showing that our method outperforms the current state-of-the-art Continual Learning methods. Our findings highlight the importance of addressing the unique challenges posed by multi-label environments in the field of Continual Learning. The code of SCAD is available at https://github.com/aimagelab/SCAD-LOD-2024.
Mask and Compress: Efficient Skeleton-based Action Recognition in Continual Learning
Jul 01, 2024



The use of skeletal data allows deep learning models to perform action recognition efficiently and effectively. Herein, we believe that exploring this problem within the context of Continual Learning is crucial. While numerous studies focus on skeleton-based action recognition from a traditional offline perspective, only a handful venture into online approaches. In this respect, we introduce CHARON (Continual Human Action Recognition On skeletoNs), which maintains consistent performance while operating within an efficient framework. Through techniques like uniform sampling, interpolation, and a memory-efficient training stage based on masking, we achieve improved recognition accuracy while minimizing computational overhead. Our experiments on Split NTU-60 and the proposed Split NTU-120 datasets demonstrate that CHARON sets a new benchmark in this domain. The code is available at https://github.com/Sperimental3/CHARON.
Trajectory Forecasting through Low-Rank Adaptation of Discrete Latent Codes
May 31, 2024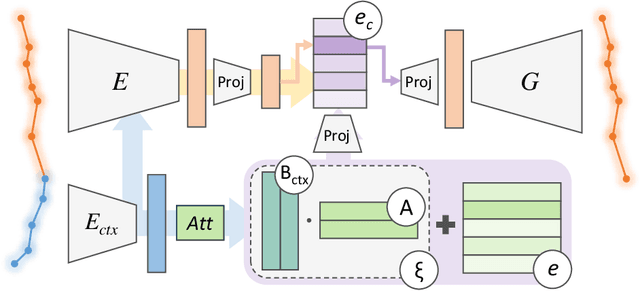
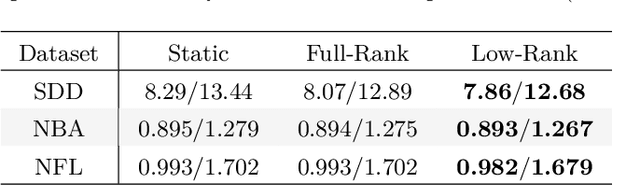
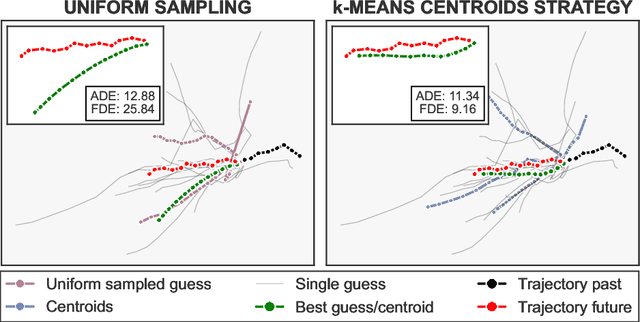
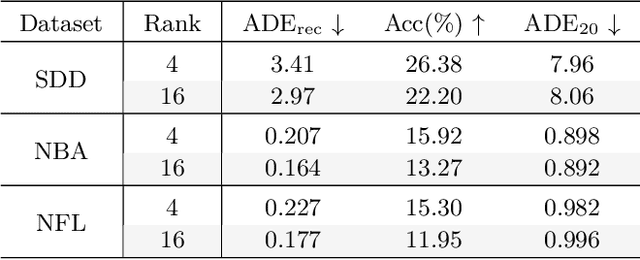
Trajectory forecasting is crucial for video surveillance analytics, as it enables the anticipation of future movements for a set of agents, e.g. basketball players engaged in intricate interactions with long-term intentions. Deep generative models offer a natural learning approach for trajectory forecasting, yet they encounter difficulties in achieving an optimal balance between sampling fidelity and diversity. We address this challenge by leveraging Vector Quantized Variational Autoencoders (VQ-VAEs), which utilize a discrete latent space to tackle the issue of posterior collapse. Specifically, we introduce an instance-based codebook that allows tailored latent representations for each example. In a nutshell, the rows of the codebook are dynamically adjusted to reflect contextual information (i.e., past motion patterns extracted from the observed trajectories). In this way, the discretization process gains flexibility, leading to improved reconstructions. Notably, instance-level dynamics are injected into the codebook through low-rank updates, which restrict the customization of the codebook to a lower dimension space. The resulting discrete space serves as the basis of the subsequent step, which regards the training of a diffusion-based predictive model. We show that such a two-fold framework, augmented with instance-level discretization, leads to accurate and diverse forecasts, yielding state-of-the-art performance on three established benchmarks.