 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBlending Participatory Design and Artificial Awareness for Trustworthy Autonomous Vehicles
Jun 09, 2025Current robotic agents, such as autonomous vehicles (AVs) and drones, need to deal with uncertain real-world environments with appropriate situational awareness (SA), risk awareness, coordination, and decision-making. The SymAware project strives to address this issue by designing an architecture for artificial awareness in multi-agent systems, enabling safe collaboration of autonomous vehicles and drones. However, these agents will also need to interact with human users (drivers, pedestrians, drone operators), which in turn requires an understanding of how to model the human in the interaction scenario, and how to foster trust and transparency between the agent and the human. In this work, we aim to create a data-driven model of a human driver to be integrated into our SA architecture, grounding our research in the principles of trustworthy human-agent interaction. To collect the data necessary for creating the model, we conducted a large-scale user-centered study on human-AV interaction, in which we investigate the interaction between the AV's transparency and the users' behavior. The contributions of this paper are twofold: First, we illustrate in detail our human-AV study and its findings, and second we present the resulting Markov chain models of the human driver computed from the study's data. Our results show that depending on the AV's transparency, the scenario's environment, and the users' demographics, we can obtain significant differences in the model's transitions.
Promoting Fairness and Diversity in Speech Datasets for Mental Health and Neurological Disorders Research
Jun 06, 2024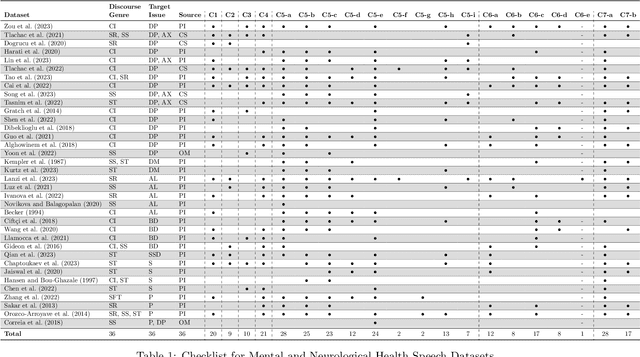
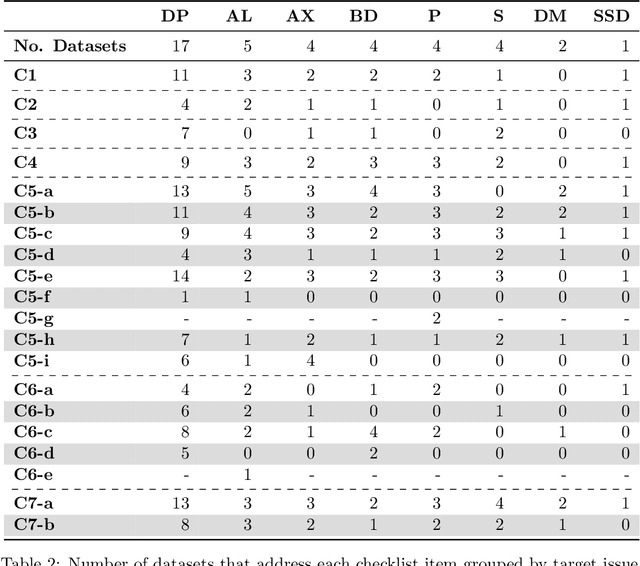
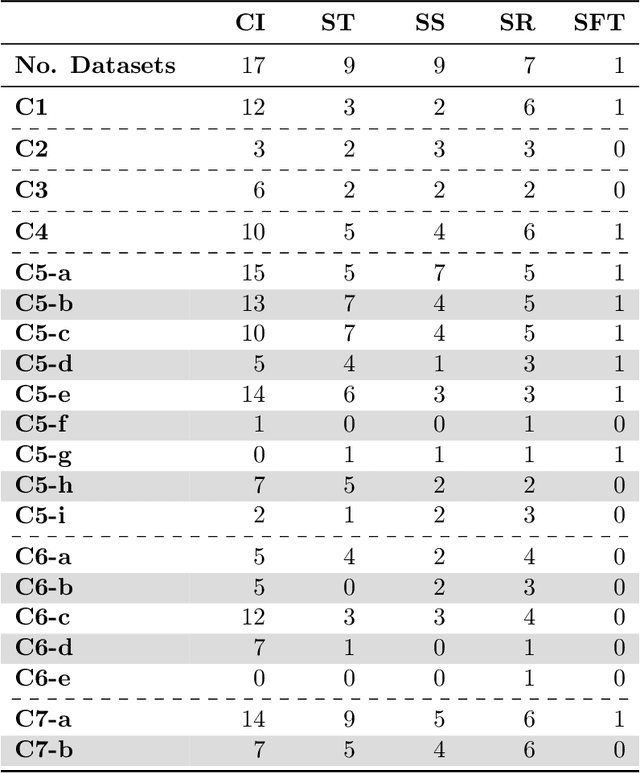
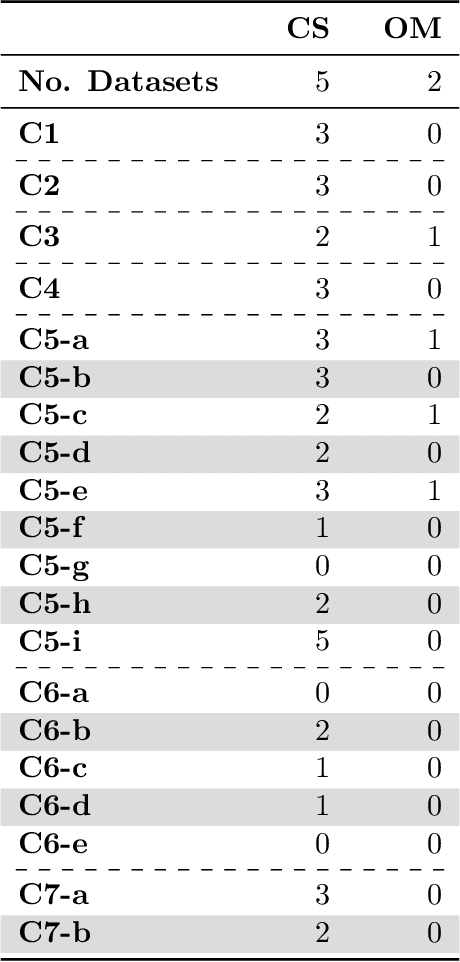
Current research in machine learning and artificial intelligence is largely centered on modeling and performance evaluation, less so on data collection. However, recent research demonstrated that limitations and biases in data may negatively impact trustworthiness and reliability. These aspects are particularly impactful on sensitive domains such as mental health and neurological disorders, where speech data are used to develop AI applications aimed at improving the health of patients and supporting healthcare providers. In this paper, we chart the landscape of available speech datasets for this domain, to highlight possible pitfalls and opportunities for improvement and promote fairness and diversity. We present a comprehensive list of desiderata for building speech datasets for mental health and neurological disorders and distill it into a checklist focused on ethical concerns to foster more responsible research.
Incorporating Rivalry in Reinforcement Learning for a Competitive Game
Aug 22, 2022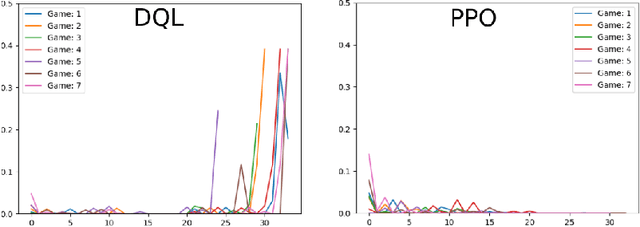
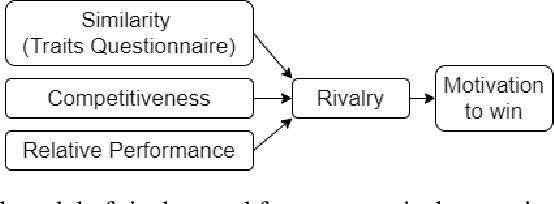
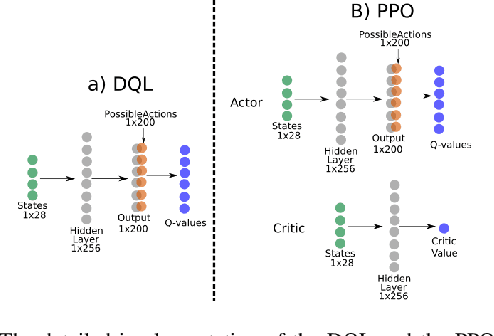
Recent advances in reinforcement learning with social agents have allowed such models to achieve human-level performance on specific interaction tasks. However, most interactive scenarios do not have a version alone as an end goal; instead, the social impact of these agents when interacting with humans is as important and largely unexplored. In this regard, this work proposes a novel reinforcement learning mechanism based on the social impact of rivalry behavior. Our proposed model aggregates objective and social perception mechanisms to derive a rivalry score that is used to modulate the learning of artificial agents. To investigate our proposed model, we design an interactive game scenario, using the Chef's Hat Card Game, and examine how the rivalry modulation changes the agent's playing style, and how this impacts the experience of human players in the game. Our results show that humans can detect specific social characteristics when playing against rival agents when compared to common agents, which directly affects the performance of the human players in subsequent games. We conclude our work by discussing how the different social and objective features that compose the artificial rivalry score contribute to our results.
Validating a Cortisol-Inspired Framework for Human-Robot Interaction with a Replication of the Still Face Paradigm
Apr 07, 2022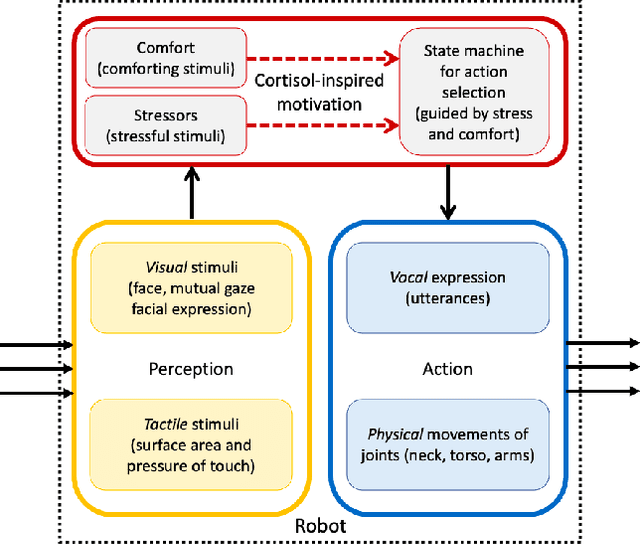
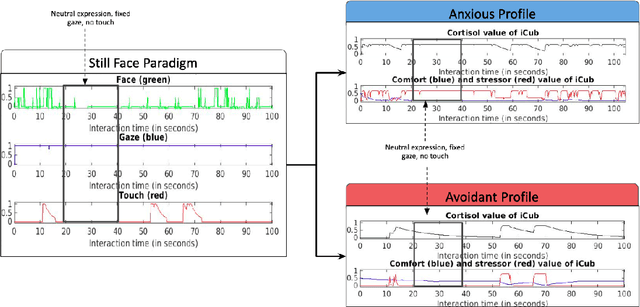
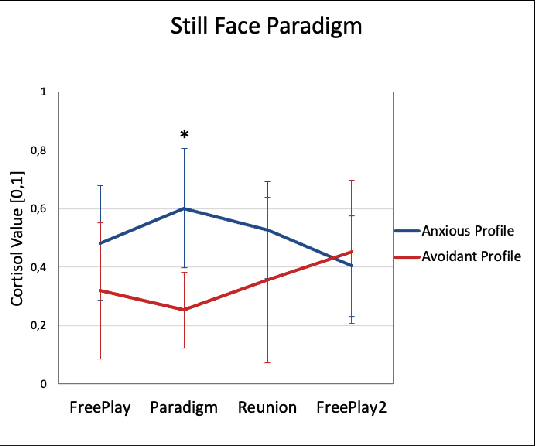
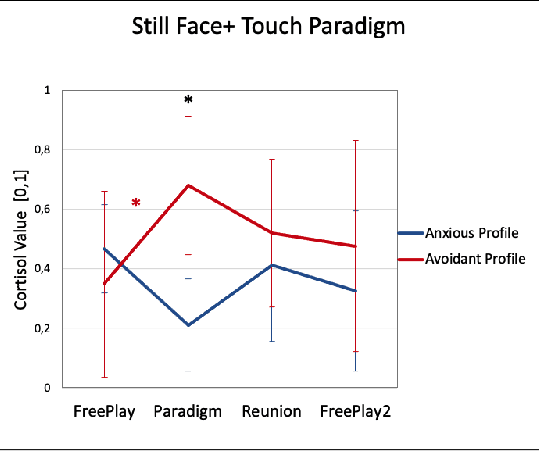
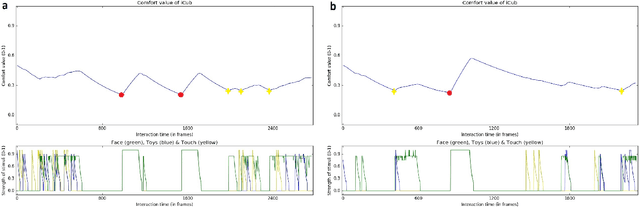
When interacting with others in our everyday life, we prefer the company of those who share with us the same desire of closeness and intimacy (or lack thereof), since this determines if our interaction will be more o less pleasant. This sort of compatibility can be inferred by our innate attachment style. The attachment style represents our characteristic way of thinking, feeling and behaving in close relationship, and other than behaviourally, it can also affect us biologically via our hormonal dynamics. When we are looking how to enrich human-robot interaction (HRI), one potential solution could be enabling robots to understand their partners' attachment style, which could then improve the perception of their partners and help them behave in an adaptive manner during the interaction. We propose to use the relationship between the attachment style and the cortisol hormone, to endow the humanoid robot iCub with an internal cortisol inspired framework that allows it to infer participant's attachment style by the effect of the interaction on its cortisol levels (referred to as R-cortisol). In this work, we present our cognitive framework and its validation during the replication of a well-known paradigm on hormonal modulation in human-human interaction (HHI) - the Still Face paradigm.
Moody Learners -- Explaining Competitive Behaviour of Reinforcement Learning Agents
Jul 30, 2020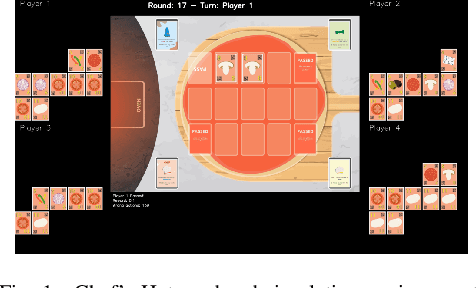
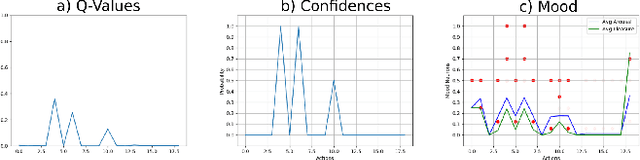
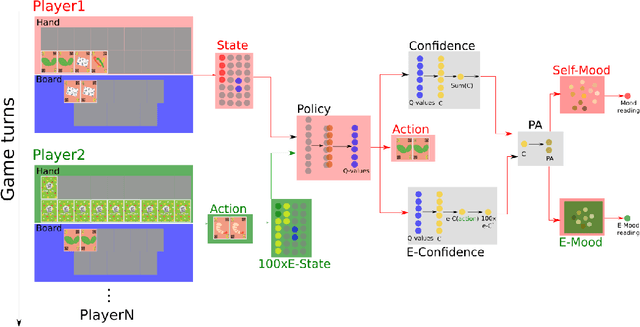
Designing the decision-making processes of artificial agents that are involved in competitive interactions is a challenging task. In a competitive scenario, the agent does not only have a dynamic environment but also is directly affected by the opponents' actions. Observing the Q-values of the agent is usually a way of explaining its behavior, however, do not show the temporal-relation between the selected actions. We address this problem by proposing the \emph{Moody framework}. We evaluate our model by performing a series of experiments using the competitive multiplayer Chef's Hat card game and discuss how our model allows the agents' to obtain a holistic representation of the competitive dynamics within the game.
Learning from Learners: Adapting Reinforcement Learning Agents to be Competitive in a Card Game
Apr 08, 2020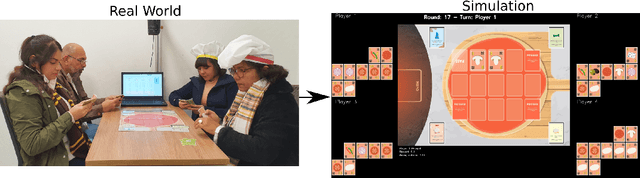
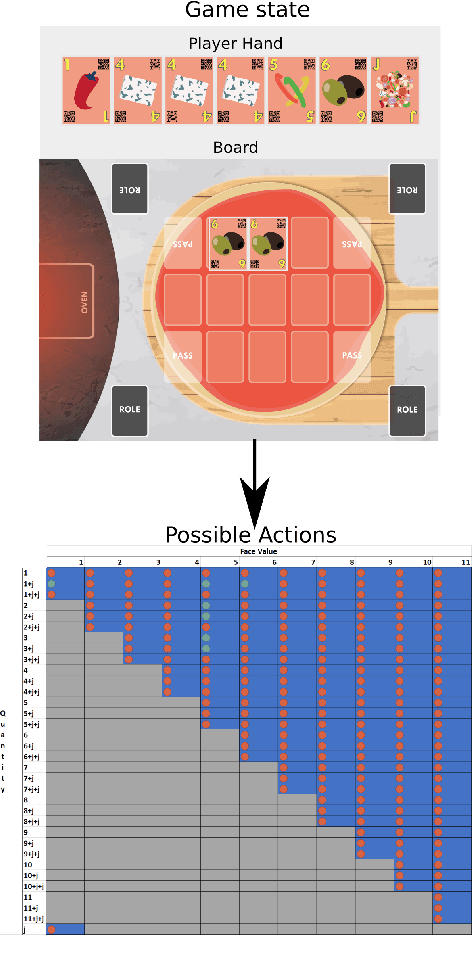
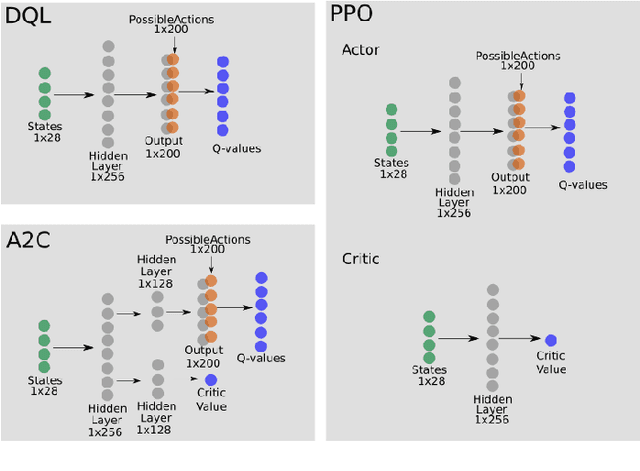
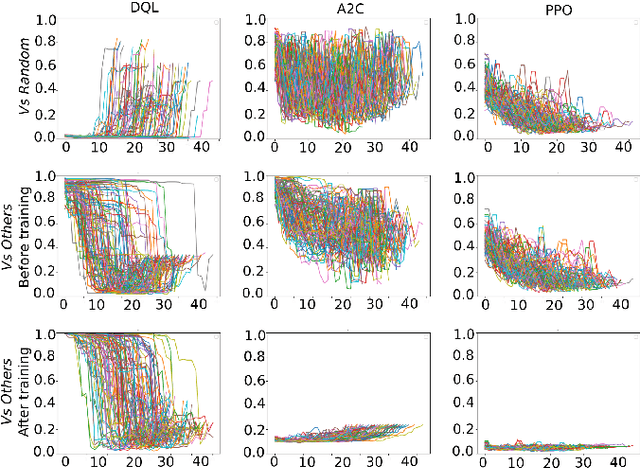
Learning how to adapt to complex and dynamic environments is one of the most important factors that contribute to our intelligence. Endowing artificial agents with this ability is not a simple task, particularly in competitive scenarios. In this paper, we present a broad study on how popular reinforcement learning algorithms can be adapted and implemented to learn and to play a real-world implementation of a competitive multiplayer card game. We propose specific training and validation routines for the learning agents, in order to evaluate how the agents learn to be competitive and explain how they adapt to each others' playing style. Finally, we pinpoint how the behavior of each agent derives from their learning style and create a baseline for future research on this scenario.
A Socially Adaptable Framework for Human-Robot Interaction
Mar 25, 2020

In our everyday lives we are accustomed to partake in complex, personalized, adaptive interactions with our peers. For a social robot to be able to recreate this same kind of rich, human-like interaction, it should be aware of our needs and affective states and be capable of continuously adapting its behavior to them. One proposed solution to this problem would involve the robot to learn how to select the behaviors that would maximize the pleasantness of the interaction for its peers, guided by an internal motivation system that would provide autonomy to its decision-making process. We are interested in studying how an adaptive robotic framework of this kind would function and personalize to different users. In addition we explore whether including the element of adaptability and personalization in a cognitive framework will bring any additional richness to the human-robot interaction (HRI), or if it will instead bring uncertainty and unpredictability that would not be accepted by the robot`s human peers. To this end, we designed a socially-adaptive framework for the humanoid robot iCub which allows it to perceive and reuse the affective and interactive signals from the person as input for the adaptation based on internal social motivation. We propose a comparative interaction study with iCub where users act as the robot's caretaker, and iCub's social adaptation is guided by an internal comfort level that varies with the amount of stimuli iCub receives from its caretaker. We investigate and compare how the internal dynamics of the robot would be perceived by people in a condition when the robot does not personalize its interaction, and in a condition where it is adaptive. Finally, we establish the potential benefits that an adaptive framework could bring to the context of having repeated interactions with a humanoid robot.