 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Socially Adaptable Framework for Human-Robot Interaction
Paper and Code
Mar 25, 2020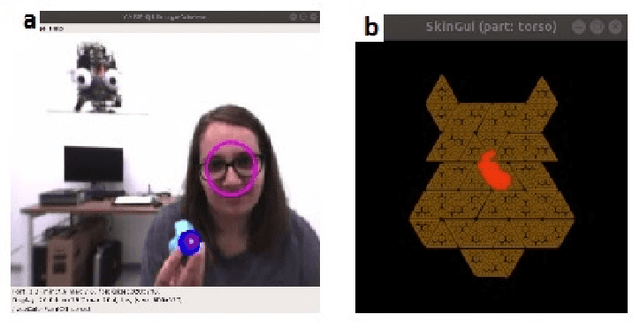

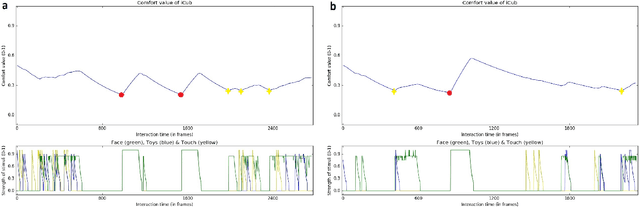
In our everyday lives we are accustomed to partake in complex, personalized, adaptive interactions with our peers. For a social robot to be able to recreate this same kind of rich, human-like interaction, it should be aware of our needs and affective states and be capable of continuously adapting its behavior to them. One proposed solution to this problem would involve the robot to learn how to select the behaviors that would maximize the pleasantness of the interaction for its peers, guided by an internal motivation system that would provide autonomy to its decision-making process. We are interested in studying how an adaptive robotic framework of this kind would function and personalize to different users. In addition we explore whether including the element of adaptability and personalization in a cognitive framework will bring any additional richness to the human-robot interaction (HRI), or if it will instead bring uncertainty and unpredictability that would not be accepted by the robot`s human peers. To this end, we designed a socially-adaptive framework for the humanoid robot iCub which allows it to perceive and reuse the affective and interactive signals from the person as input for the adaptation based on internal social motivation. We propose a comparative interaction study with iCub where users act as the robot's caretaker, and iCub's social adaptation is guided by an internal comfort level that varies with the amount of stimuli iCub receives from its caretaker. We investigate and compare how the internal dynamics of the robot would be perceived by people in a condition when the robot does not personalize its interaction, and in a condition where it is adaptive. Finally, we establish the potential benefits that an adaptive framework could bring to the context of having repeated interactions with a humanoid robot.