 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Neuromorphic Navigation: Guiding Physical Robots with Event-Based Sensing and Task-Specific Reconfigurable Autonomy Stack
Mar 11, 2025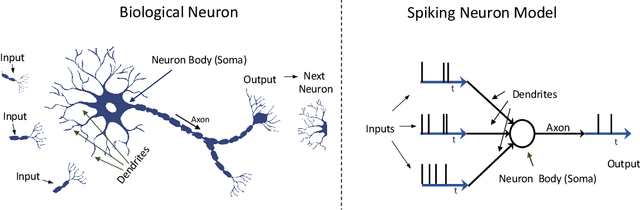
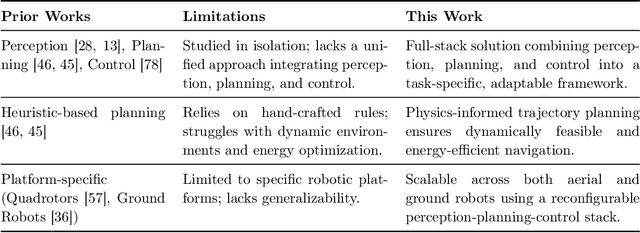
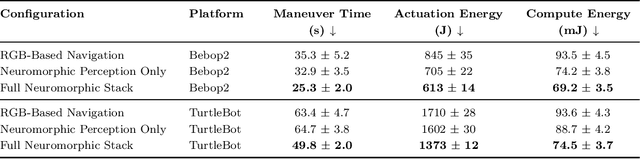
Neuromorphic vision, inspired by biological neural systems, has recently gained significant attention for its potential in enhancing robotic autonomy. This paper presents a systematic exploration of a proposed Neuromorphic Navigation framework that uses event-based neuromorphic vision to enable efficient, real-time navigation in robotic systems. We discuss the core concepts of neuromorphic vision and navigation, highlighting their impact on improving robotic perception and decision-making. The proposed reconfigurable Neuromorphic Navigation framework adapts to the specific needs of both ground robots (Turtlebot) and aerial robots (Bebop2 quadrotor), addressing the task-specific design requirements (algorithms) for optimal performance across the autonomous navigation stack -- Perception, Planning, and Control. We demonstrate the versatility and the effectiveness of the framework through two case studies: a Turtlebot performing local replanning for real-time navigation and a Bebop2 quadrotor navigating through moving gates. Our work provides a scalable approach to task-specific, real-time robot autonomy leveraging neuromorphic systems, paving the way for energy-efficient autonomous navigation.
FEDORA: Flying Event Dataset fOr Reactive behAvior
May 22, 2023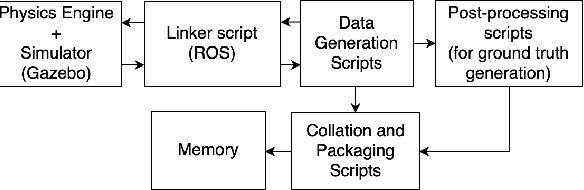
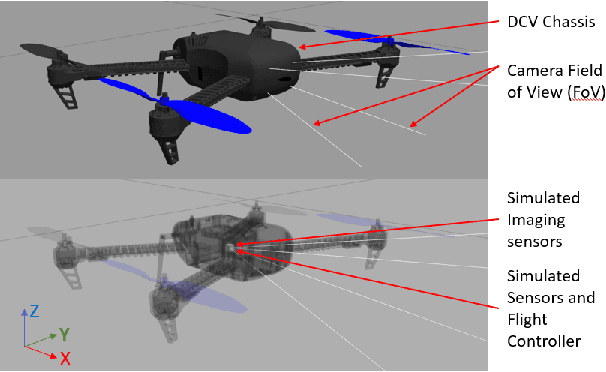

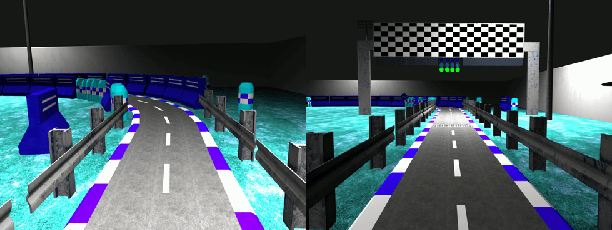
The ability of living organisms to perform complex high speed manoeuvers in flight with a very small number of neurons and an incredibly low failure rate highlights the efficacy of these resource-constrained biological systems. Event-driven hardware has emerged, in recent years, as a promising avenue for implementing complex vision tasks in resource-constrained environments. Vision-based autonomous navigation and obstacle avoidance consists of several independent but related tasks such as optical flow estimation, depth estimation, Simultaneous Localization and Mapping (SLAM), object detection, and recognition. To ensure coherence between these tasks, it is imperative that they be trained on a single dataset. However, most existing datasets provide only a selected subset of the required data. This makes inter-network coherence difficult to achieve. Another limitation of existing datasets is the limited temporal resolution they provide. To address these limitations, we present FEDORA, a first-of-its-kind fully synthetic dataset for vision-based tasks, with ground truths for depth, pose, ego-motion, and optical flow. FEDORA is the first dataset to provide optical flow at three different frequencies - 10Hz, 25Hz, and 50Hz
HALSIE - Hybrid Approach to Learning Segmentation by Simultaneously Exploiting Image and Event Modalities
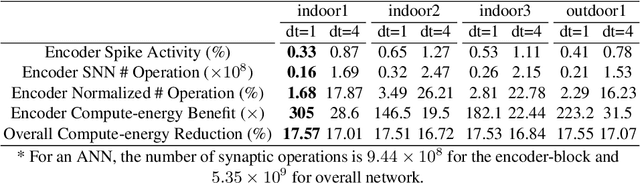
Nov 22, 2022Standard frame-based algorithms fail to retrieve accurate segmentation maps in challenging real-time applications like autonomous navigation, owing to the limited dynamic range and motion blur prevalent in traditional cameras. Event cameras address these limitations by asynchronously detecting changes in per-pixel intensity to generate event streams with high temporal resolution, high dynamic range, and no motion blur. However, event camera outputs cannot be directly used to generate reliable segmentation maps as they only capture information at the pixels in motion. To augment the missing contextual information, we postulate that fusing spatially dense frames with temporally dense events can generate semantic maps with fine-grained predictions. To this end, we propose HALSIE, a hybrid approach to learning segmentation by simultaneously leveraging image and event modalities. To enable efficient learning across modalities, our proposed hybrid framework comprises two input branches, a Spiking Neural Network (SNN) branch and a standard Artificial Neural Network (ANN) branch to process event and frame data respectively, while exploiting their corresponding neural dynamics. Our hybrid network outperforms the state-of-the-art semantic segmentation benchmarks on DDD17 and MVSEC datasets and shows comparable performance on the DSEC-Semantic dataset with upto 33.23$\times$ reduction in network parameters. Further, our method shows upto 18.92$\times$ improvement in inference cost compared to existing SOTA approaches, making it suitable for resource-constrained edge applications.
Spike-FlowNet: Event-based Optical Flow Estimation with Energy-Efficient Hybrid Neural Networks
Mar 14, 2020
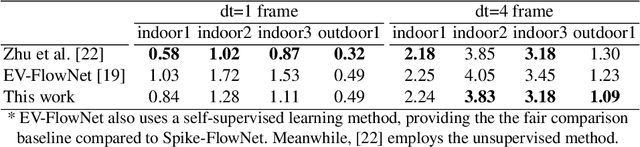

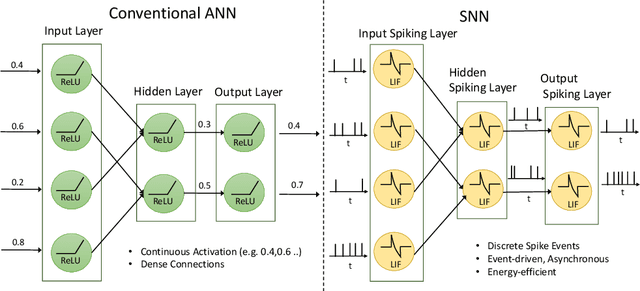
Event-based cameras display great potential for a variety of conditions such as high-speed motion detection and enabling navigation in low-light environments where conventional frame-based cameras suffer critically. This is attributed to their high temporal resolution, high dynamic range, and low-power consumption. However, conventional computer vision methods as well as deep Analog Neural Networks (ANNs) are not suited to work well with the asynchronous and discrete nature of event camera outputs. Spiking Neural Networks (SNNs) serve as ideal paradigms to handle event camera outputs, but deep SNNs suffer in terms of performance due to spike vanishing phenomenon. To overcome these issues, we present Spike-FlowNet, a deep hybrid neural network architecture integrating SNNs and ANNs for efficiently estimating optical flow from sparse event camera outputs without sacrificing the performance. The network is end-to-end trained with self-supervised learning on Multi-Vehicle Stereo Event Camera (MVSEC) dataset. Spike-FlowNet outperforms its corresponding ANN-based method in terms of the optical flow prediction capability while providing significant computational efficiency.
Low Cost Autonomous Navigation and Control of a Mechanically Balanced Bicycle with Dual Locomotion Mode
Nov 01, 2016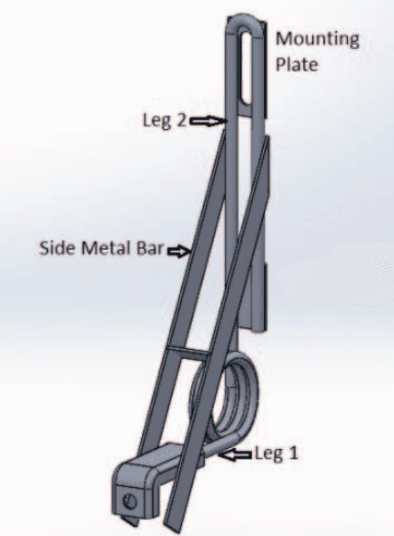
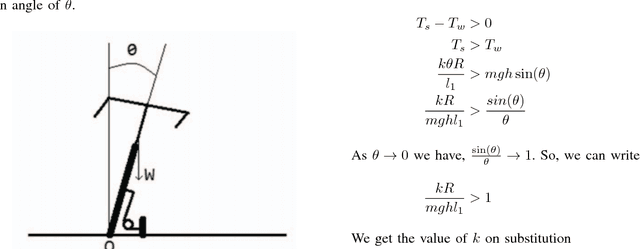
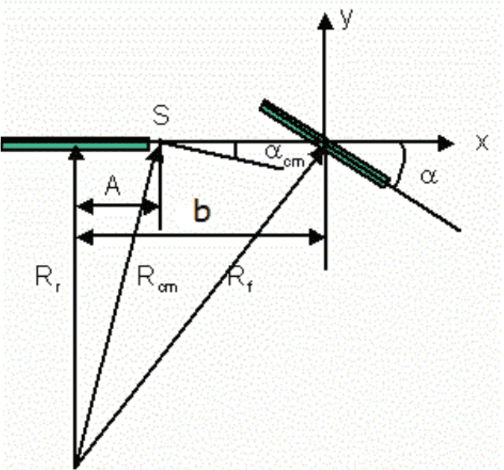
On the lines of the huge and varied efforts in the field of automation with respect to technology development and innovation of vehicles to make them run autonomously, this paper presents an innovation to a bicycle. A normal daily use bicycle was modified at low cost such that it runs autonomously, while maintaining its original form i.e. the manual drive. Hence, a bicycle which could be normally driven by any human and with a press of switch could run autonomously according to the needs of the user has been developed.
* Published in the International Transportation Electrification Conference (ITEC) in 2015 organized by IEEE Industrial Application Society (IAS) and SAE India in Chennai, India