 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRefine and Align: Confidence Calibration through Multi-Agent Interaction in VQA
Nov 14, 2025In the context of Visual Question Answering (VQA) and Agentic AI, calibration refers to how closely an AI system's confidence in its answers reflects their actual correctness. This aspect becomes especially important when such systems operate autonomously and must make decisions under visual uncertainty. While modern VQA systems, powered by advanced vision-language models (VLMs), are increasingly used in high-stakes domains like medical diagnostics and autonomous navigation due to their improved accuracy, the reliability of their confidence estimates remains under-examined. Particularly, these systems often produce overconfident responses. To address this, we introduce AlignVQA, a debate-based multi-agent framework, in which diverse specialized VLM -- each following distinct prompting strategies -- generate candidate answers and then engage in two-stage interaction: generalist agents critique, refine and aggregate these proposals. This debate process yields confidence estimates that more accurately reflect the model's true predictive performance. We find that more calibrated specialized agents produce better aligned confidences. Furthermore, we introduce a novel differentiable calibration-aware loss function called aligncal designed to fine-tune the specialized agents by minimizing an upper bound on the calibration error. This objective explicitly improves the fidelity of each agent's confidence estimates. Empirical results across multiple benchmark VQA datasets substantiate the efficacy of our approach, demonstrating substantial reductions in calibration discrepancies. Furthermore, we propose a novel differentiable calibration-aware loss to fine-tune the specialized agents and improve the quality of their individual confidence estimates based on minimising upper bound calibration error.
Towards Realistic Generative 3D Face Models
Apr 24, 2023
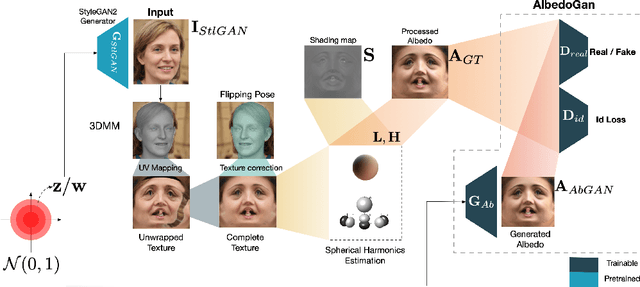


In recent years, there has been significant progress in 2D generative face models fueled by applications such as animation, synthetic data generation, and digital avatars. However, due to the absence of 3D information, these 2D models often struggle to accurately disentangle facial attributes like pose, expression, and illumination, limiting their editing capabilities. To address this limitation, this paper proposes a 3D controllable generative face model to produce high-quality albedo and precise 3D shape leveraging existing 2D generative models. By combining 2D face generative models with semantic face manipulation, this method enables editing of detailed 3D rendered faces. The proposed framework utilizes an alternating descent optimization approach over shape and albedo. Differentiable rendering is used to train high-quality shapes and albedo without 3D supervision. Moreover, this approach outperforms the state-of-the-art (SOTA) methods in the well-known NoW benchmark for shape reconstruction. It also outperforms the SOTA reconstruction models in recovering rendered faces' identities across novel poses by an average of 10%. Additionally, the paper demonstrates direct control of expressions in 3D faces by exploiting latent space leading to text-based editing of 3D faces.
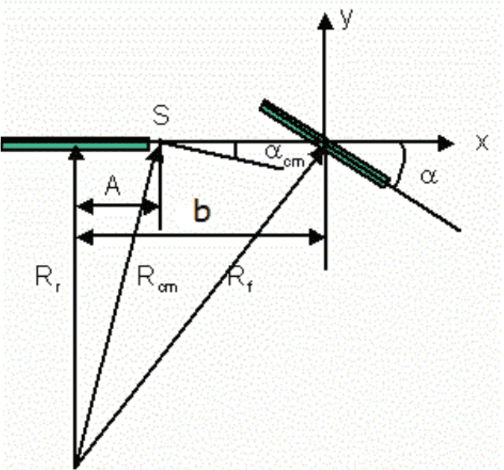
Modeling and Control of an Autonomous Three Wheeled Mobile Robot with Front Steer
Dec 05, 2016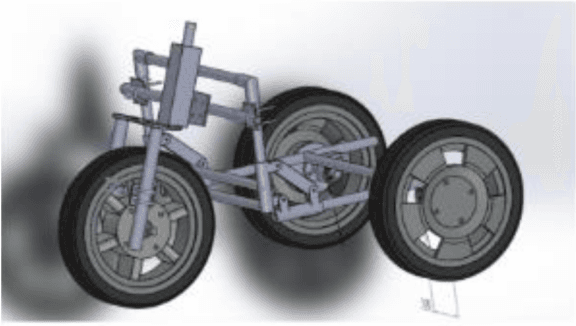
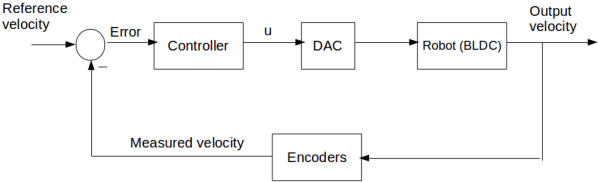
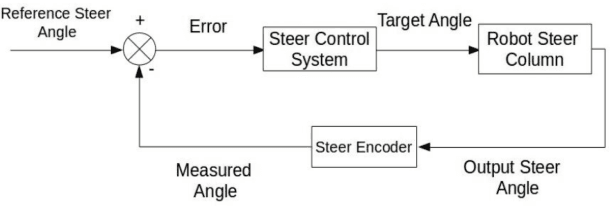
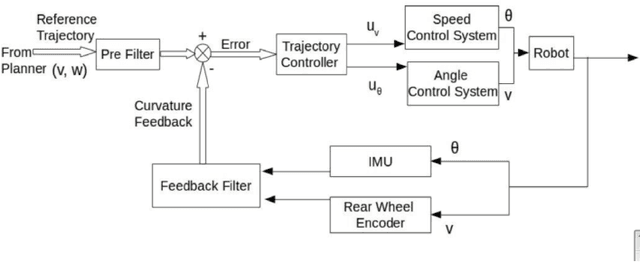
Modeling and control strategies for a design of an autonomous three wheeled mobile robot with front wheel steer is presented. Although, the three-wheel vehicle design with front wheel steer is common in automotive vehicles used often in public transport, but its advantages in navigation and localization of autonomous vehicles is seldom utilized. We present the system model for such a robotic vehicle. A PID controller for speed control is designed for the model obtained and has been implemented in a digital control framework. The trajectory control framework, which is a challenging task for such a three-wheeled robot has also been presented in the paper. The derived system model has been verified using experimental results obtained for the robot vehicle design. Controller performance and robustness issues have also been discussed briefly.
Low Cost Autonomous Navigation and Control of a Mechanically Balanced Bicycle with Dual Locomotion Mode
Nov 01, 2016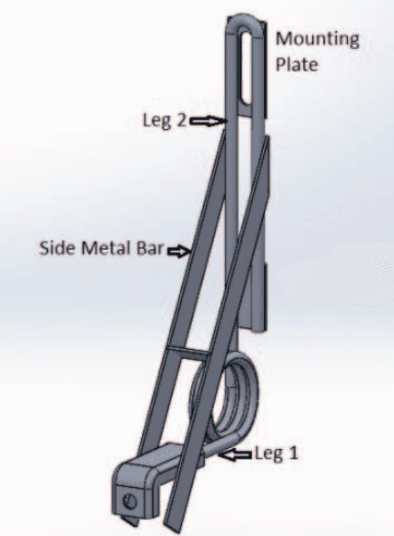
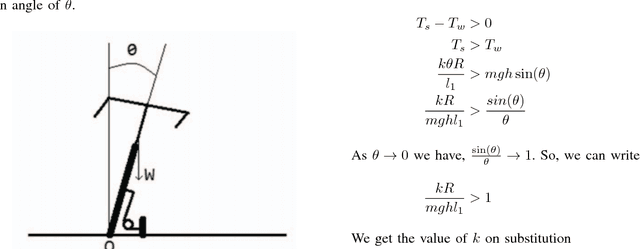
On the lines of the huge and varied efforts in the field of automation with respect to technology development and innovation of vehicles to make them run autonomously, this paper presents an innovation to a bicycle. A normal daily use bicycle was modified at low cost such that it runs autonomously, while maintaining its original form i.e. the manual drive. Hence, a bicycle which could be normally driven by any human and with a press of switch could run autonomously according to the needs of the user has been developed.
* Published in the International Transportation Electrification Conference (ITEC) in 2015 organized by IEEE Industrial Application Society (IAS) and SAE India in Chennai, India