 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDevelopment of Decision Support System for Effective COVID-19 Management
Mar 12, 2022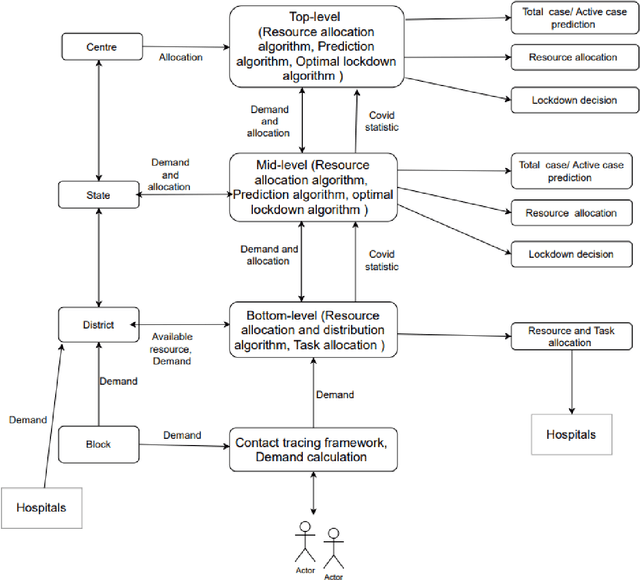
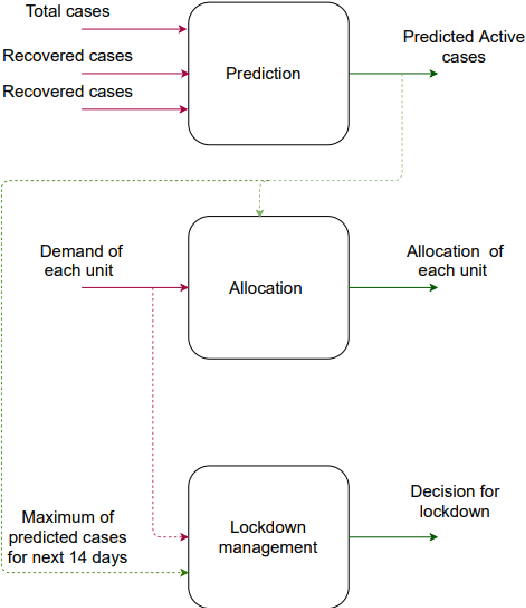
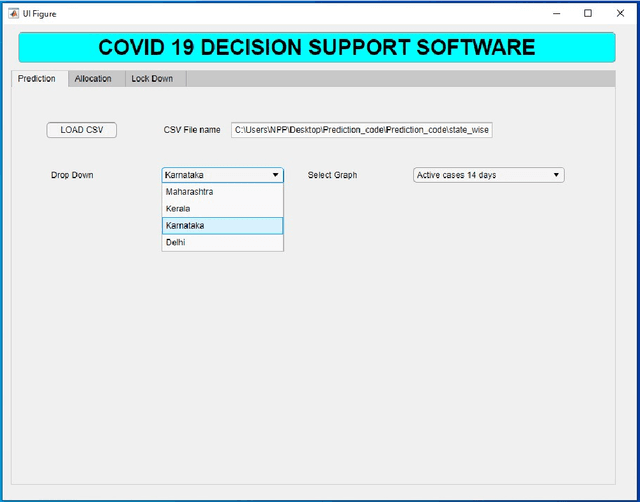
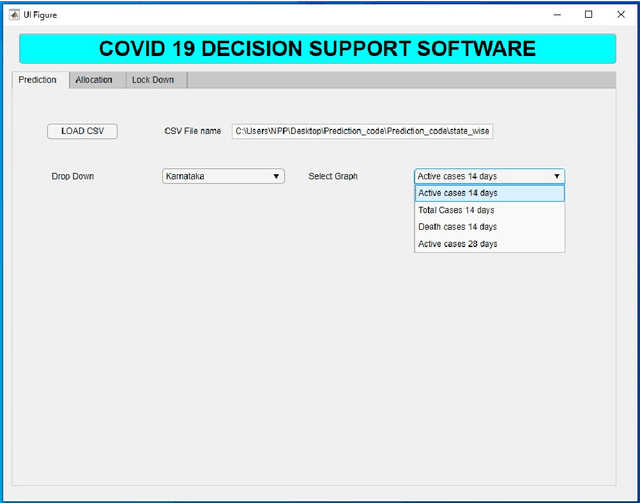
This paper discusses a Decision Support System (DSS) for cases prediction, allocation of resources, and lockdown management for managing COVID-19 at different levels of a government authority. Algorithms incorporated in the DSS are based on a data-driven modeling approach and independent of physical parameters of the region, and hence the proposed DSS is applicable to any area. Based on predicted active cases, the demand of lower-level units and total availability, allocation, and lockdown decision is made. A MATLAB-based GUI is developed based on the proposed DSS and could be implemented by the local authority.
Target State Estimation and Prediction for High Speed Interception
Oct 04, 2020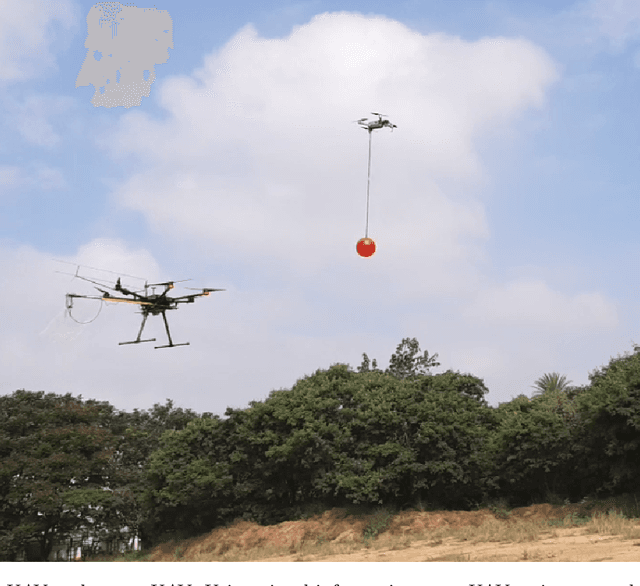
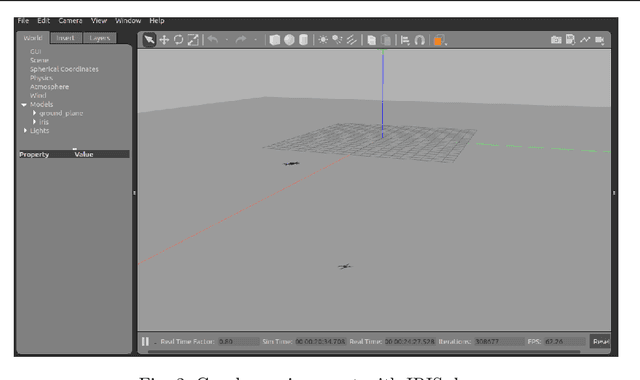
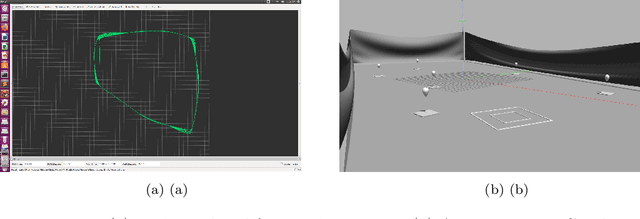
Accurate estimation and prediction of trajectory is essential for interception of any high speed target. In this paper, an extended Kalman filter is used to estimate the current location of target from its visual information and then predict its future position by using the observation sequence. Target motion model is developed considering the approximate known pattern of the target trajectory. In this work, we utilise visual information of the target to carry out the predictions. The proposed algorithm is developed in ROS-Gazebo environment and is verified using hardware implementation.
* arXiv admin note: substantial text overlap with arXiv:2009.00067
Vision based Target Interception using Aerial Manipulation
Sep 28, 2020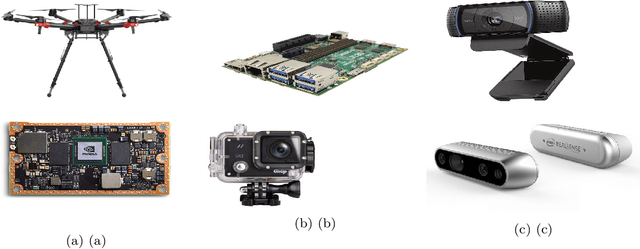

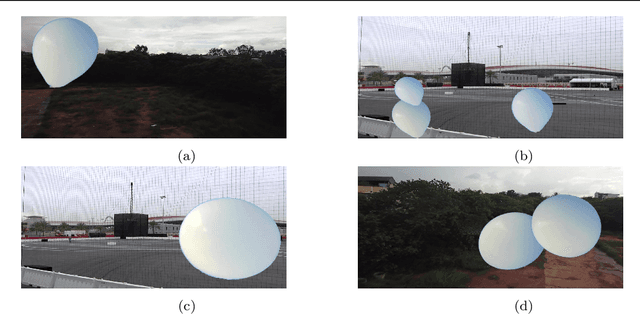
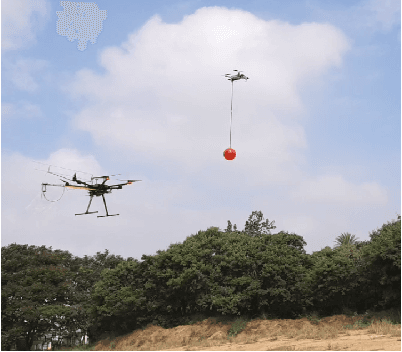
Selective interception of objects in unknown environment autonomously by UAVs is an interesting problem. In this work, vision based interception is carried out. This problem is a part of challenge 1 of Mohammed Bin Zayed International Robotic Challenge, 2020, where, balloons are kept at five random locations for the UAVs to autonomously explore, detect, approach and intercept. The problem requires a different formulation to execute compared to the normal interception problems in literature. This work details the different aspect of this problem from vision to manipulator design. The frame work is implemented on hardware using Robot Operating System (ROS) communication architecture.
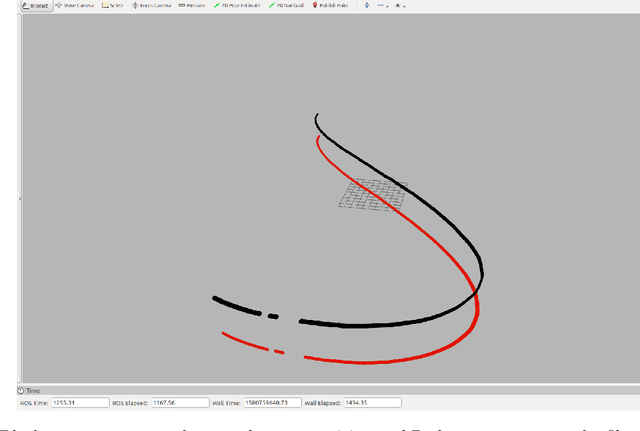
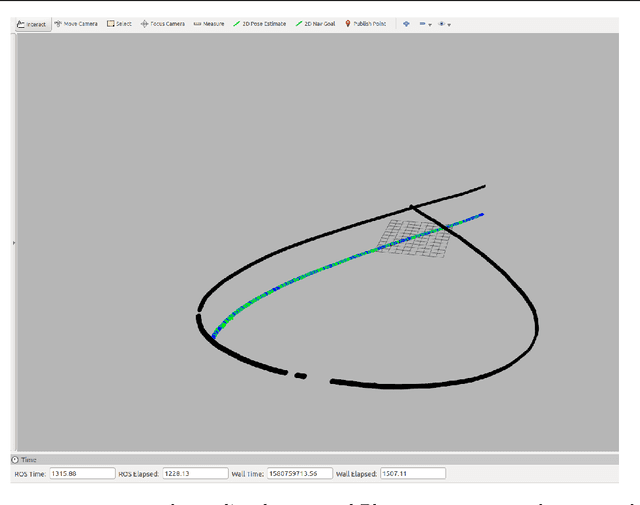
Accurate Prediction and Estimation of 3D-Repetitive-Trajectories using Kalman Filter, Machine Learning and Curve-Fitting Method
Aug 31, 2020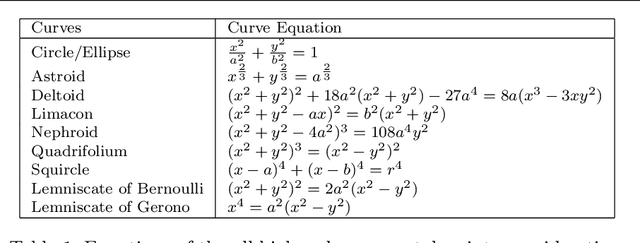

Accurate estimation and prediction of trajectory is essential for the capture of any high speed target. In this paper, an extended Kalman filter (EKF) is used to track the target in the first loop of the trajectory to collect data points and then a combination of machine learning with least-square curve-fitting is used to accurately estimate future positions for the subsequent loops. The EKF estimates the current location of target from its visual information and then predicts its future position by using the observation sequence. We utilize noisy visual information of the target from the three dimensional trajectory to carry out the predictions. The proposed algorithm is developed in ROS-Gazebo environment and is implemented on hardware.
Low Cost Autonomous Navigation and Control of a Mechanically Balanced Bicycle with Dual Locomotion Mode
Nov 01, 2016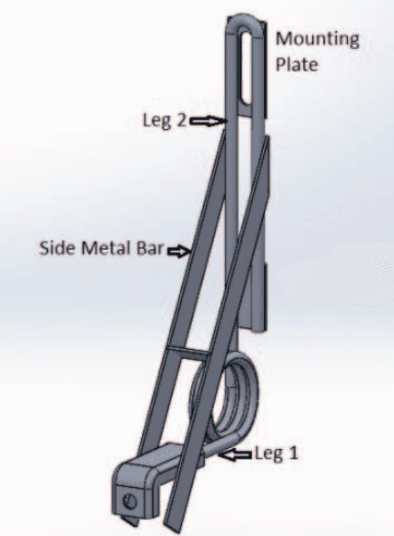
On the lines of the huge and varied efforts in the field of automation with respect to technology development and innovation of vehicles to make them run autonomously, this paper presents an innovation to a bicycle. A normal daily use bicycle was modified at low cost such that it runs autonomously, while maintaining its original form i.e. the manual drive. Hence, a bicycle which could be normally driven by any human and with a press of switch could run autonomously according to the needs of the user has been developed.
* Published in the International Transportation Electrification Conference (ITEC) in 2015 organized by IEEE Industrial Application Society (IAS) and SAE India in Chennai, India