 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccurate Prediction and Estimation of 3D-Repetitive-Trajectories using Kalman Filter, Machine Learning and Curve-Fitting Method
Aug 31, 2020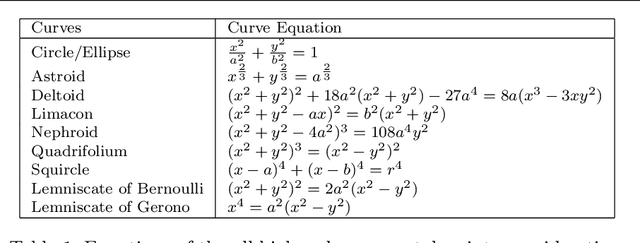
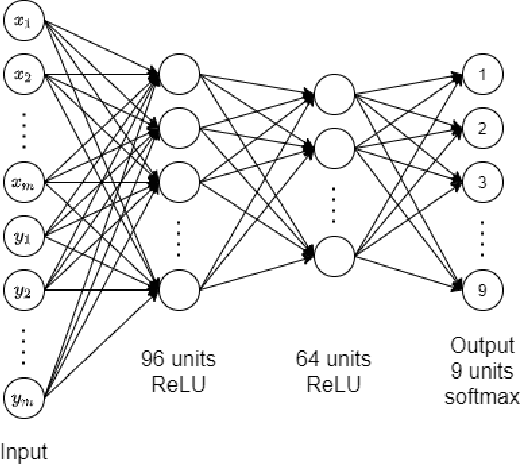

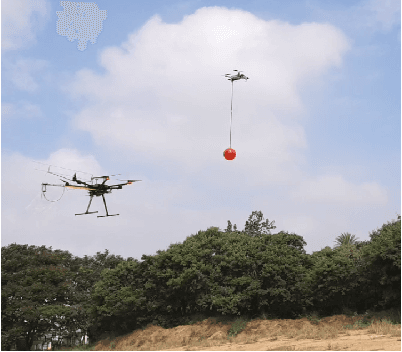
Accurate estimation and prediction of trajectory is essential for the capture of any high speed target. In this paper, an extended Kalman filter (EKF) is used to track the target in the first loop of the trajectory to collect data points and then a combination of machine learning with least-square curve-fitting is used to accurately estimate future positions for the subsequent loops. The EKF estimates the current location of target from its visual information and then predicts its future position by using the observation sequence. We utilize noisy visual information of the target from the three dimensional trajectory to carry out the predictions. The proposed algorithm is developed in ROS-Gazebo environment and is implemented on hardware.
Control of a Nature-inspired Scorpion using Reinforcement Learning
Aug 31, 2020
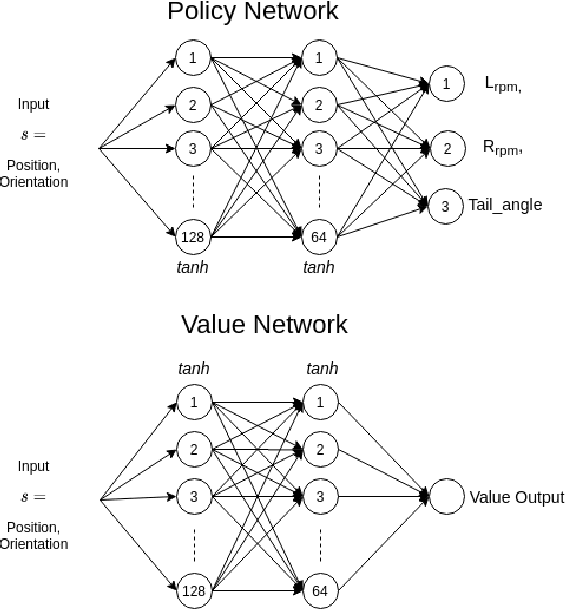
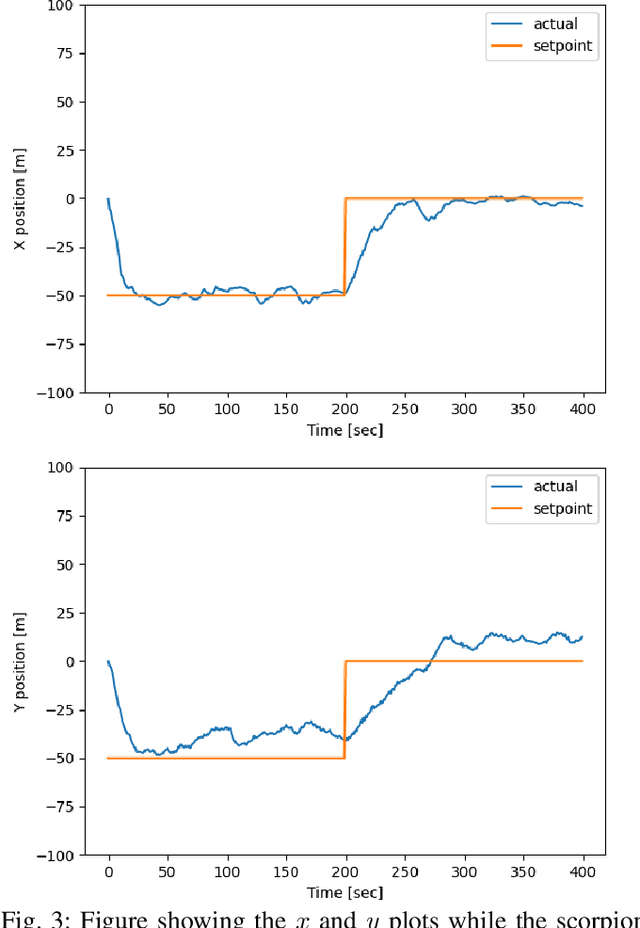
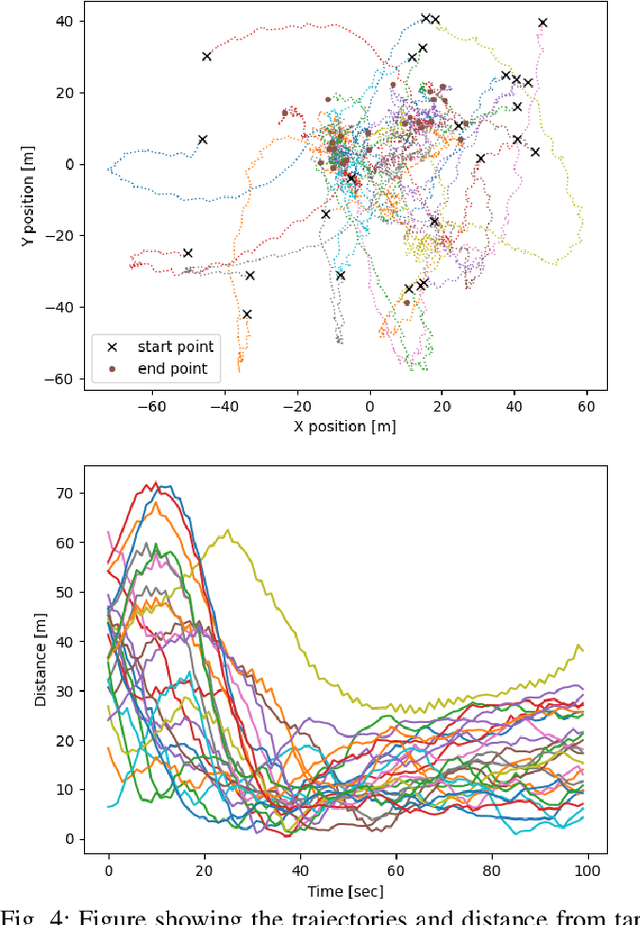
A terrestrial robot that can maneuver rough terrain and scout places is very useful in mapping out unknown areas. It can also be used explore dangerous areas in place of humans. A terrestrial robot modeled after a scorpion will be able to traverse undetected and can be used for surveillance purposes. Therefore, this paper proposes modelling of a scorpion inspired robot and a reinforcement learning (RL) based controller for navigation. The robot scorpion uses serial four bar mechanisms for the legs movements. It also has an active tail and a movable claw. The controller is trained to navigate the robot scorpion to the target waypoint. The simulation results demonstrate efficient navigation of the robot scorpion.
Mid-flight Propeller Failure Detection and Control of Propeller-deficient Quadcopter using Reinforcement Learning
Feb 26, 2020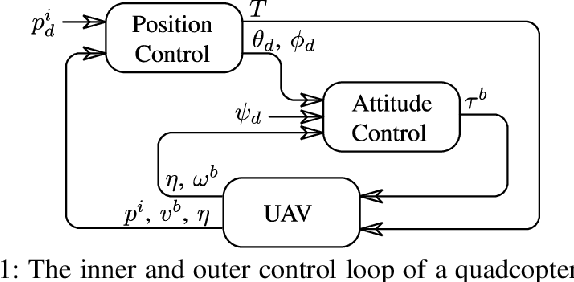
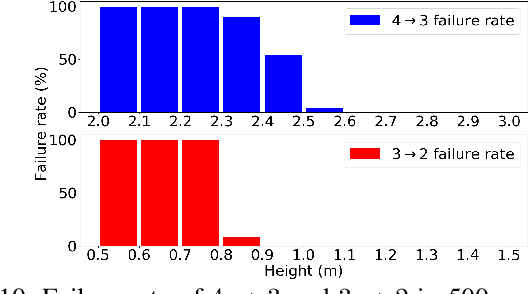
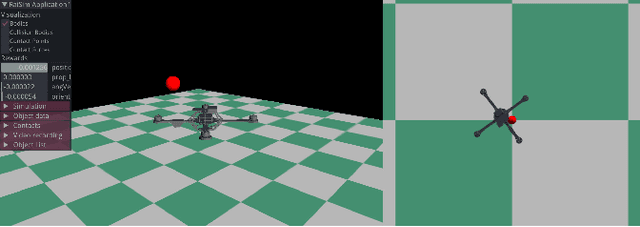
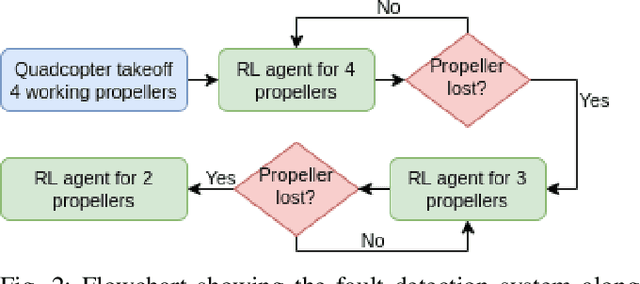
Quadcopters can suffer from loss of propellers in mid-flight, thus requiring a need to have a system that detects single and multiple propeller failures and an adaptive controller that stabilizes the propeller-deficient quadcopter. This paper presents reinforcement learning based controllers for quadcopters with 4, 3, and 2 (opposing) functional propellers. The system is adaptive, unlike traditional control system based controllers. In order to develop an end-to-end system, the paper also proposes a novel neural network based propeller fault detection system to detect propeller loss and switch to the appropriate controller. Our simulation results demonstrate a stable quadcopter with efficient waypoint tracking for all controllers. The detection system is able to detect propeller failure within 2.5 seconds and stabilize for all heights above 3 meters.