Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl of a Nature-inspired Scorpion using Reinforcement Learning
Aug 31, 2020
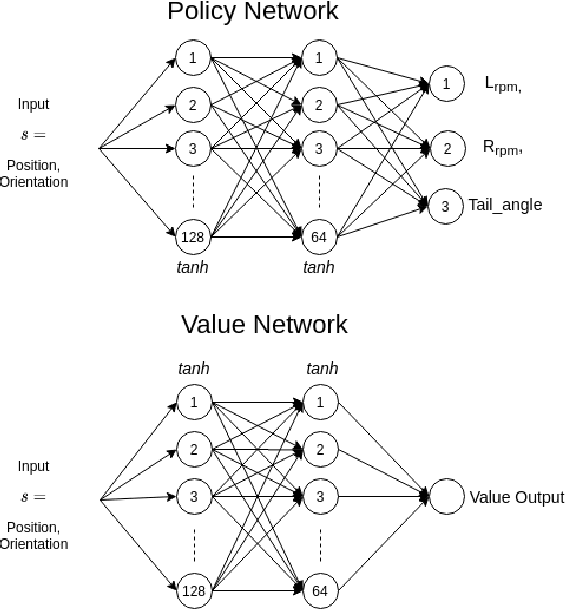
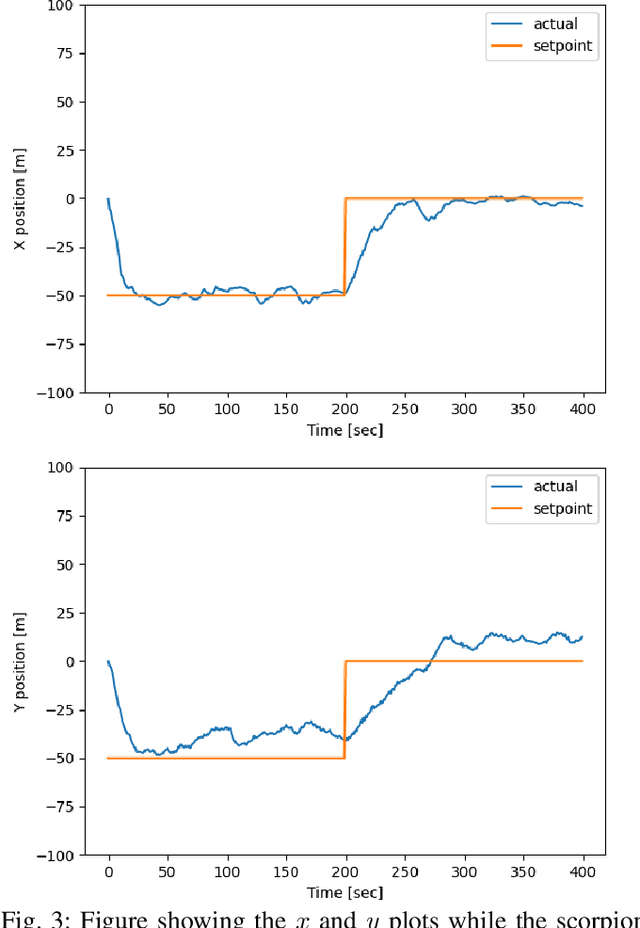
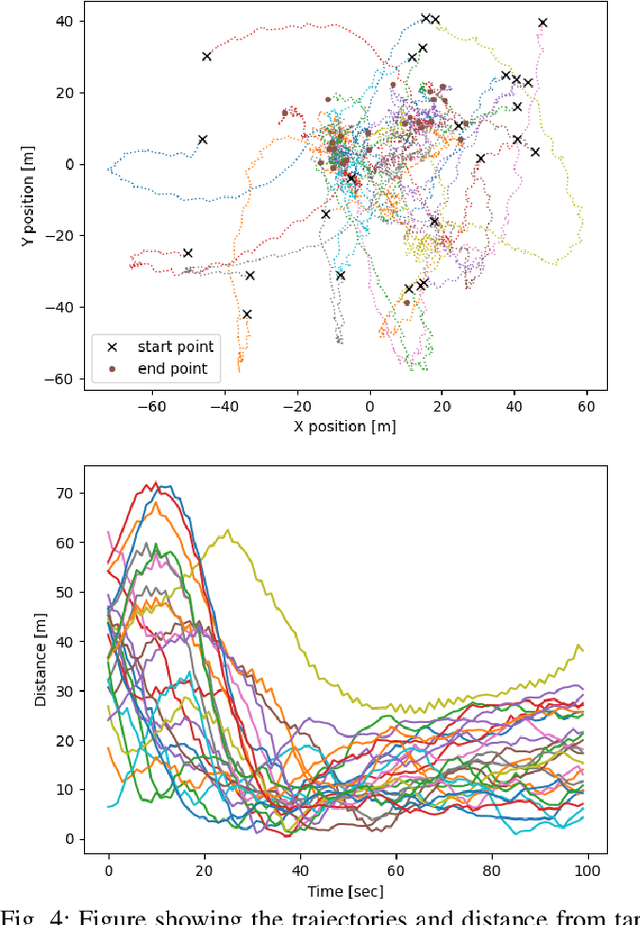
A terrestrial robot that can maneuver rough terrain and scout places is very useful in mapping out unknown areas. It can also be used explore dangerous areas in place of humans. A terrestrial robot modeled after a scorpion will be able to traverse undetected and can be used for surveillance purposes. Therefore, this paper proposes modelling of a scorpion inspired robot and a reinforcement learning (RL) based controller for navigation. The robot scorpion uses serial four bar mechanisms for the legs movements. It also has an active tail and a movable claw. The controller is trained to navigate the robot scorpion to the target waypoint. The simulation results demonstrate efficient navigation of the robot scorpion.
* 4 pages, 5 figures
Via