 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMid-flight Propeller Failure Detection and Control of Propeller-deficient Quadcopter using Reinforcement Learning
Paper and Code
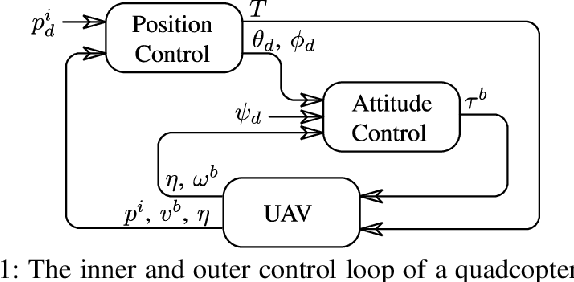
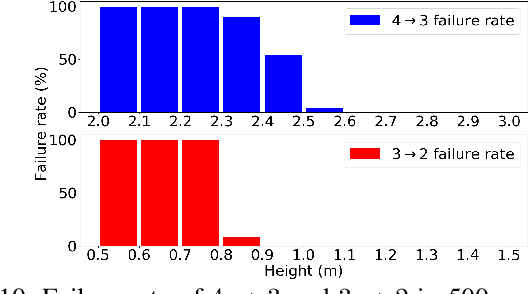
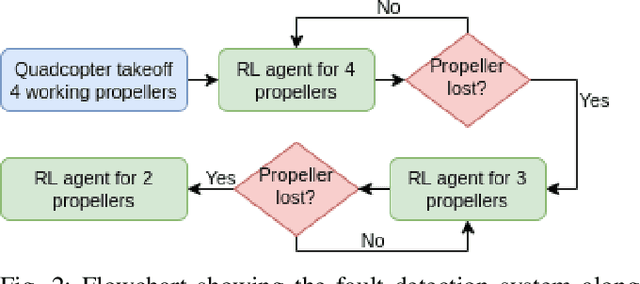
Quadcopters can suffer from loss of propellers in mid-flight, thus requiring a need to have a system that detects single and multiple propeller failures and an adaptive controller that stabilizes the propeller-deficient quadcopter. This paper presents reinforcement learning based controllers for quadcopters with 4, 3, and 2 (opposing) functional propellers. The system is adaptive, unlike traditional control system based controllers. In order to develop an end-to-end system, the paper also proposes a novel neural network based propeller fault detection system to detect propeller loss and switch to the appropriate controller. Our simulation results demonstrate a stable quadcopter with efficient waypoint tracking for all controllers. The detection system is able to detect propeller failure within 2.5 seconds and stabilize for all heights above 3 meters.