 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling and Control of an Autonomous Three Wheeled Mobile Robot with Front Steer
Paper and Code
Dec 05, 2016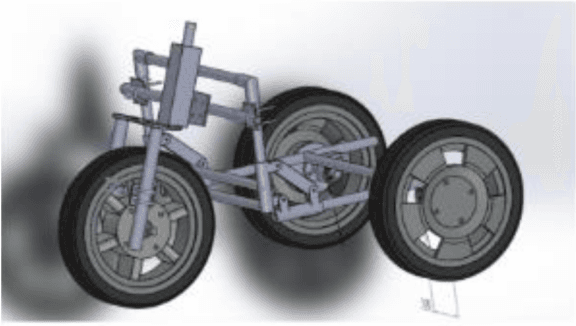
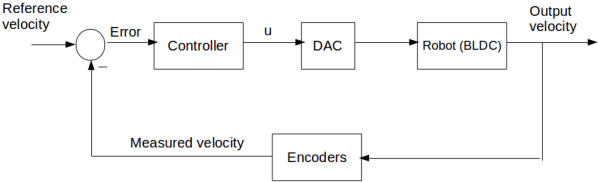
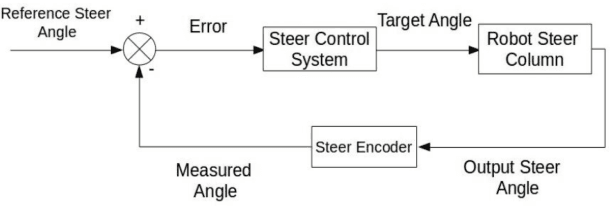
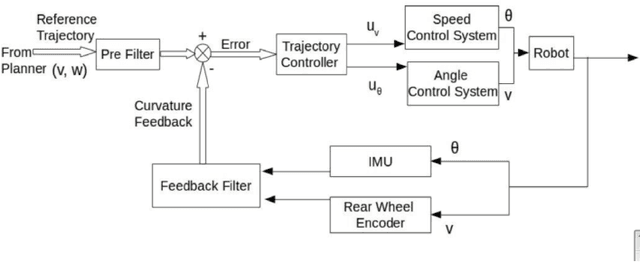
Modeling and control strategies for a design of an autonomous three wheeled mobile robot with front wheel steer is presented. Although, the three-wheel vehicle design with front wheel steer is common in automotive vehicles used often in public transport, but its advantages in navigation and localization of autonomous vehicles is seldom utilized. We present the system model for such a robotic vehicle. A PID controller for speed control is designed for the model obtained and has been implemented in a digital control framework. The trajectory control framework, which is a challenging task for such a three-wheeled robot has also been presented in the paper. The derived system model has been verified using experimental results obtained for the robot vehicle design. Controller performance and robustness issues have also been discussed briefly.