 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpike-FlowNet: Event-based Optical Flow Estimation with Energy-Efficient Hybrid Neural Networks
Paper and Code

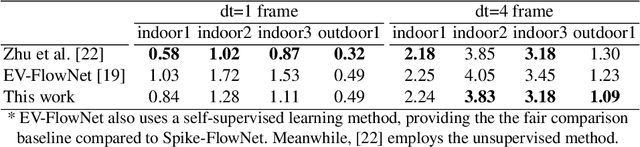

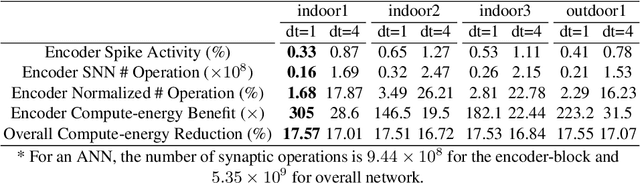
Event-based cameras display great potential for a variety of conditions such as high-speed motion detection and enabling navigation in low-light environments where conventional frame-based cameras suffer critically. This is attributed to their high temporal resolution, high dynamic range, and low-power consumption. However, conventional computer vision methods as well as deep Analog Neural Networks (ANNs) are not suited to work well with the asynchronous and discrete nature of event camera outputs. Spiking Neural Networks (SNNs) serve as ideal paradigms to handle event camera outputs, but deep SNNs suffer in terms of performance due to spike vanishing phenomenon. To overcome these issues, we present Spike-FlowNet, a deep hybrid neural network architecture integrating SNNs and ANNs for efficiently estimating optical flow from sparse event camera outputs without sacrificing the performance. The network is end-to-end trained with self-supervised learning on Multi-Vehicle Stereo Event Camera (MVSEC) dataset. Spike-FlowNet outperforms its corresponding ANN-based method in terms of the optical flow prediction capability while providing significant computational efficiency.