 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBringing Value Models Back: Generative Critics for Value Modeling in LLM Reinforcement Learning
Apr 12, 2026Credit assignment is a central challenge in reinforcement learning (RL). Classical actor-critic methods address this challenge through fine-grained advantage estimation based on a learned value function. However, learned value models are often avoided in modern large language model (LLM) RL because conventional discriminative critics are difficult to train reliably. We revisit value modeling and argue that this difficulty is partly due to limited expressiveness. In particular, representation complexity theory suggests that value functions can be hard to approximate under the one-shot prediction paradigm used by existing value models, and our scaling experiments show that such critics do not improve reliably with scale. Motivated by this observation, we propose Generative Actor-Critic (GenAC), which replaces one-shot scalar value prediction with a generative critic that performs chain-of-thought reasoning before producing a value estimate. We further introduce In-Context Conditioning, which helps the critic remain calibrated to the current actor throughout training. GenAC improves value approximation, ranking reliability, and out-of-distribution generalization, and these gains translate into stronger downstream RL performance than both value-based and value-free baselines. Overall, our results suggest that stronger value modeling is a promising direction for improving credit assignment in LLM reinforcement learning.
SHAPE: Stage-aware Hierarchical Advantage via Potential Estimation for LLM Reasoning
Apr 08, 2026Process supervision has emerged as a promising approach for enhancing LLM reasoning, yet existing methods fail to distinguish meaningful progress from mere verbosity, leading to limited reasoning capabilities and unresolved token inefficiency. To address this, we propose Stage-aware Hierarchical Advantage via Potential Estimation (SHAPE), a framework that formalizes reasoning as a trajectory through a state space of empirical solvability. SHAPE introduces a hierarchical credit assignment mechanism: at the segment level, it employs a stage-aware advantage function to prioritize efficient breakthroughs in low-potential states; at the token level, it utilizes entropy-driven redistribution to sharpen execution signals. Extensive experiments in math reasoning across three base models and five benchmarks demonstrate that SHAPE achieves an average accuracy gain of 3% with 30% reduced token consumption.
UniDexGrasp++: Improving Dexterous Grasping Policy Learning via Geometry-aware Curriculum and Iterative Generalist-Specialist Learning
Apr 04, 2023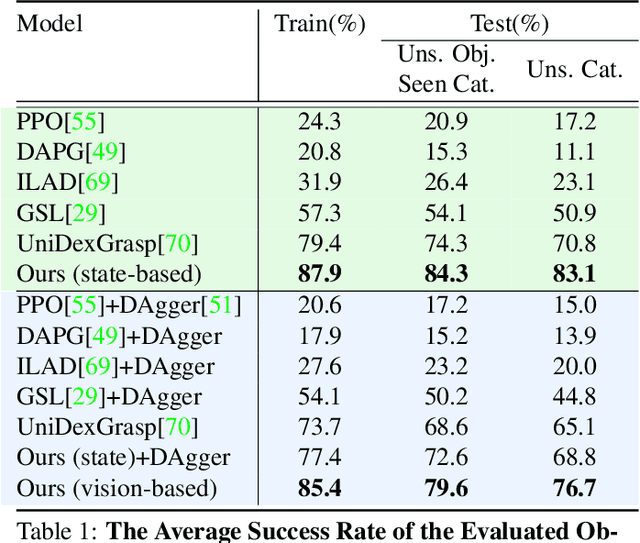
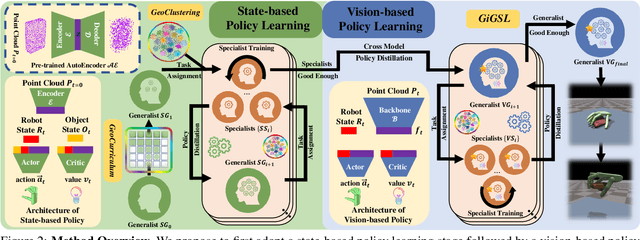
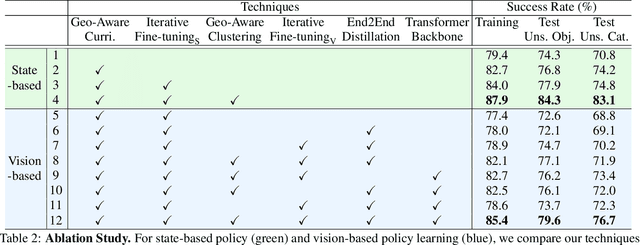
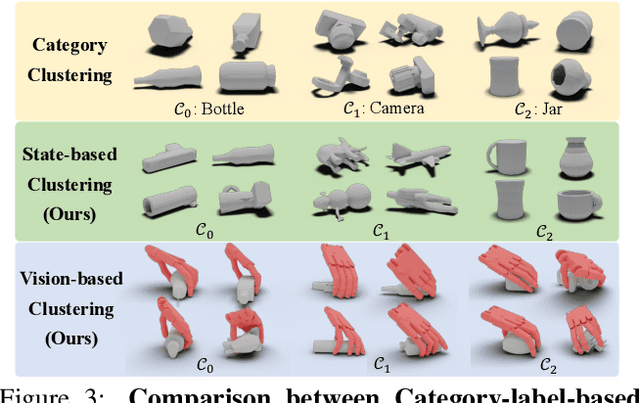
We propose a novel, object-agnostic method for learning a universal policy for dexterous object grasping from realistic point cloud observations and proprioceptive information under a table-top setting, namely UniDexGrasp++. To address the challenge of learning the vision-based policy across thousands of object instances, we propose Geometry-aware Curriculum Learning (GeoCurriculum) and Geometry-aware iterative Generalist-Specialist Learning (GiGSL) which leverage the geometry feature of the task and significantly improve the generalizability. With our proposed techniques, our final policy shows universal dexterous grasping on thousands of object instances with 85.4% and 78.2% success rate on the train set and test set which outperforms the state-of-the-art baseline UniDexGrasp by 11.7% and 11.3%, respectively.
UniDexGrasp: Universal Robotic Dexterous Grasping via Learning Diverse Proposal Generation and Goal-Conditioned Policy
Mar 02, 2023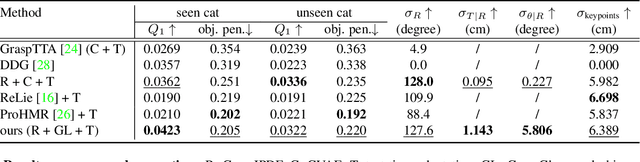
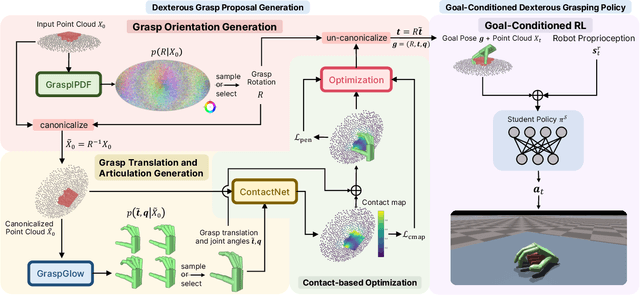
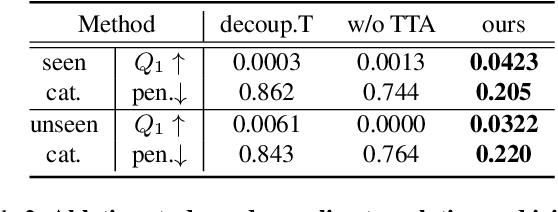
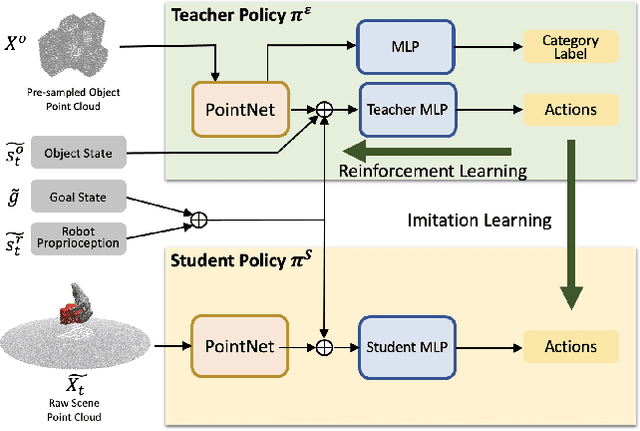
In this work, we tackle the problem of learning universal robotic dexterous grasping from a point cloud observation under a table-top setting. The goal is to grasp and lift up objects in high-quality and diverse ways and generalize across hundreds of categories and even the unseen. Inspired by successful pipelines used in parallel gripper grasping, we split the task into two stages: 1) grasp proposal (pose) generation and 2) goal-conditioned grasp execution. For the first stage, we propose a novel probabilistic model of grasp pose conditioned on the point cloud observation that factorizes rotation from translation and articulation. Trained on our synthesized large-scale dexterous grasp dataset, this model enables us to sample diverse and high-quality dexterous grasp poses for the object in the point cloud. For the second stage, we propose to replace the motion planning used in parallel gripper grasping with a goal-conditioned grasp policy, due to the complexity involved in dexterous grasping execution. Note that it is very challenging to learn this highly generalizable grasp policy that only takes realistic inputs without oracle states. We thus propose several important innovations, including state canonicalization, object curriculum, and teacher-student distillation. Integrating the two stages, our final pipeline becomes the first to achieve universal generalization for dexterous grasping, demonstrating an average success rate of more than 60% on thousands of object instances, which significantly out performs all baselines, meanwhile showing only a minimal generalization gap.