 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniDexGrasp++: Improving Dexterous Grasping Policy Learning via Geometry-aware Curriculum and Iterative Generalist-Specialist Learning
Paper and Code
Apr 04, 2023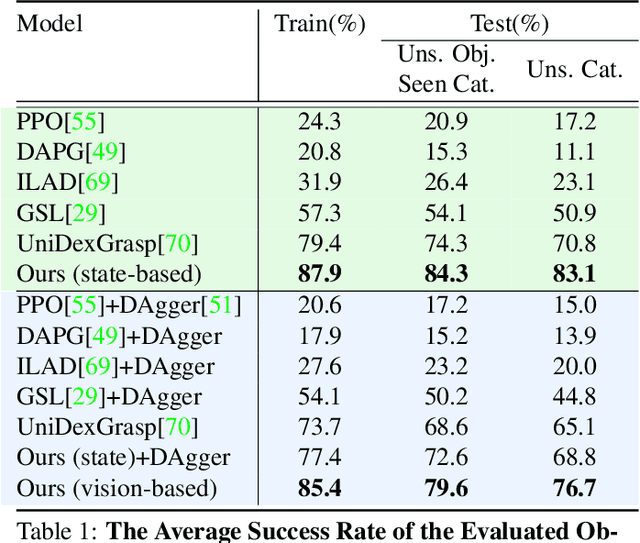
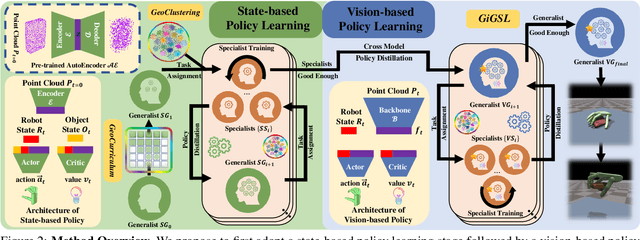
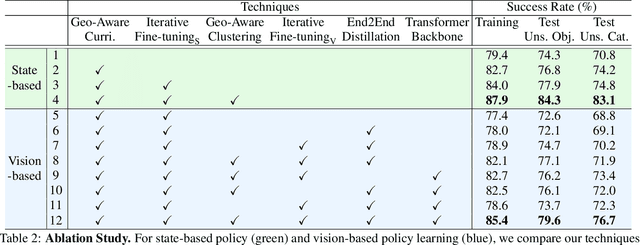
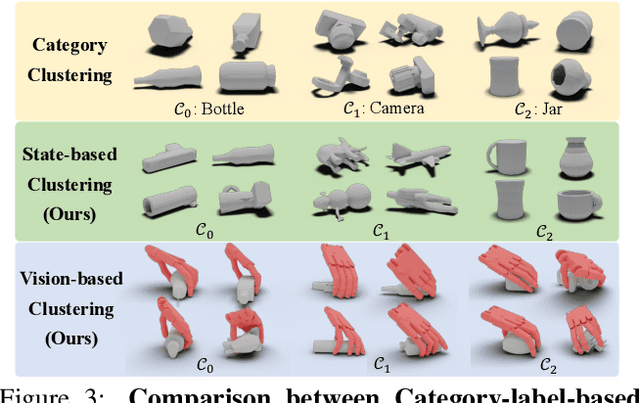
We propose a novel, object-agnostic method for learning a universal policy for dexterous object grasping from realistic point cloud observations and proprioceptive information under a table-top setting, namely UniDexGrasp++. To address the challenge of learning the vision-based policy across thousands of object instances, we propose Geometry-aware Curriculum Learning (GeoCurriculum) and Geometry-aware iterative Generalist-Specialist Learning (GiGSL) which leverage the geometry feature of the task and significantly improve the generalizability. With our proposed techniques, our final policy shows universal dexterous grasping on thousands of object instances with 85.4% and 78.2% success rate on the train set and test set which outperforms the state-of-the-art baseline UniDexGrasp by 11.7% and 11.3%, respectively.