 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3DLLM-Mem: Long-Term Spatial-Temporal Memory for Embodied 3D Large Language Model
May 28, 2025Humans excel at performing complex tasks by leveraging long-term memory across temporal and spatial experiences. In contrast, current Large Language Models (LLMs) struggle to effectively plan and act in dynamic, multi-room 3D environments. We posit that part of this limitation is due to the lack of proper 3D spatial-temporal memory modeling in LLMs. To address this, we first introduce 3DMem-Bench, a comprehensive benchmark comprising over 26,000 trajectories and 2,892 embodied tasks, question-answering and captioning, designed to evaluate an agent's ability to reason over long-term memory in 3D environments. Second, we propose 3DLLM-Mem, a novel dynamic memory management and fusion model for embodied spatial-temporal reasoning and actions in LLMs. Our model uses working memory tokens, which represents current observations, as queries to selectively attend to and fuse the most useful spatial and temporal features from episodic memory, which stores past observations and interactions. Our approach allows the agent to focus on task-relevant information while maintaining memory efficiency in complex, long-horizon environments. Experimental results demonstrate that 3DLLM-Mem achieves state-of-the-art performance across various tasks, outperforming the strongest baselines by 16.5% in success rate on 3DMem-Bench's most challenging in-the-wild embodied tasks.
Smart Explorer: Recognizing Objects in Dense Clutter via Interactive Exploration
Aug 06, 2022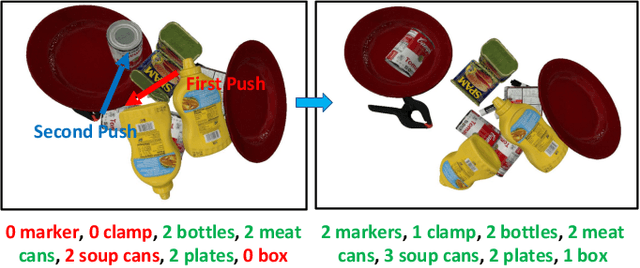
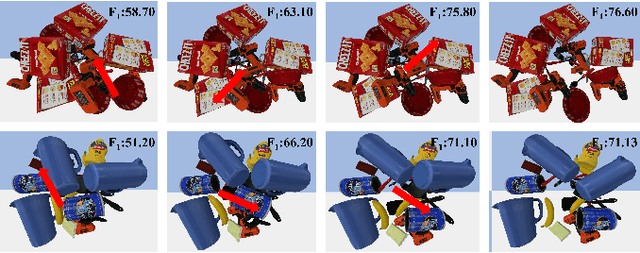
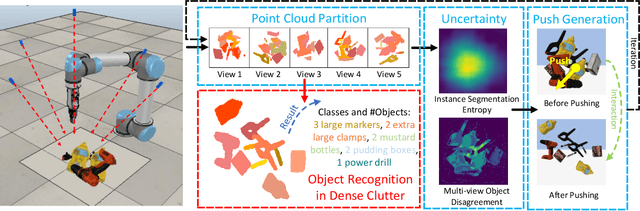
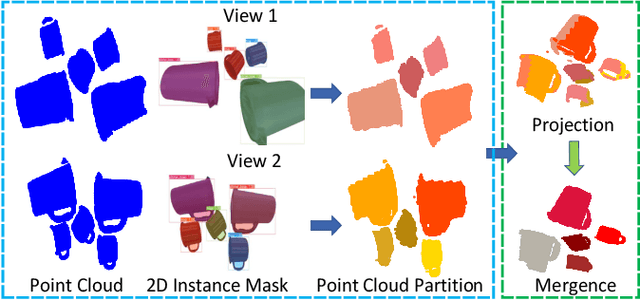
Recognizing objects in dense clutter accurately plays an important role to a wide variety of robotic manipulation tasks including grasping, packing, rearranging and many others. However, conventional visual recognition models usually miss objects because of the significant occlusion among instances and causes incorrect prediction due to the visual ambiguity with the high object crowdedness. In this paper, we propose an interactive exploration framework called Smart Explorer for recognizing all objects in dense clutters. Our Smart Explorer physically interacts with the clutter to maximize the recognition performance while minimize the number of motions, where the false positives and negatives can be alleviated effectively with the optimal accuracy-efficiency trade-offs. Specifically, we first collect the multi-view RGB-D images of the clutter and reconstruct the corresponding point cloud. By aggregating the instance segmentation of RGB images across views, we acquire the instance-wise point cloud partition of the clutter through which the existed classes and the number of objects for each class are predicted. The pushing actions for effective physical interaction are generated to sizably reduce the recognition uncertainty that consists of the instance segmentation entropy and multi-view object disagreement. Therefore, the optimal accuracy-efficiency trade-off of object recognition in dense clutter is achieved via iterative instance prediction and physical interaction. Extensive experiments demonstrate that our Smart Explorer acquires promising recognition accuracy with only a few actions, which also outperforms the random pushing by a large margin.
LiDAR Distillation: Bridging the Beam-Induced Domain Gap for 3D Object Detection
Mar 28, 2022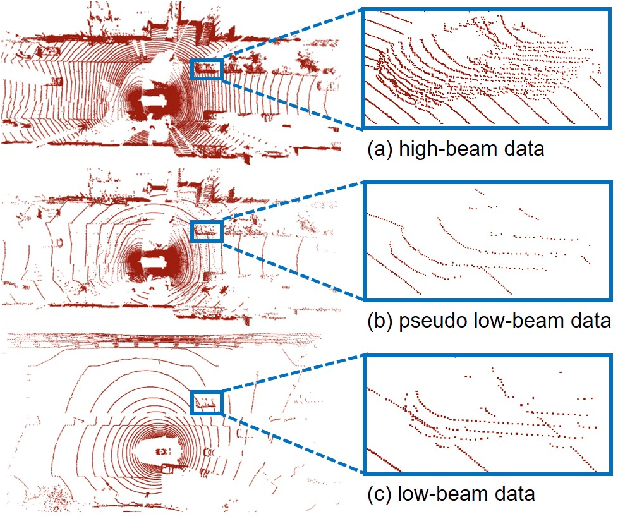
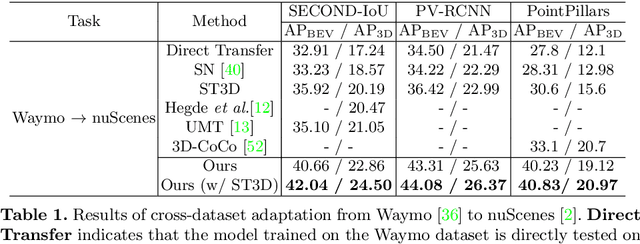
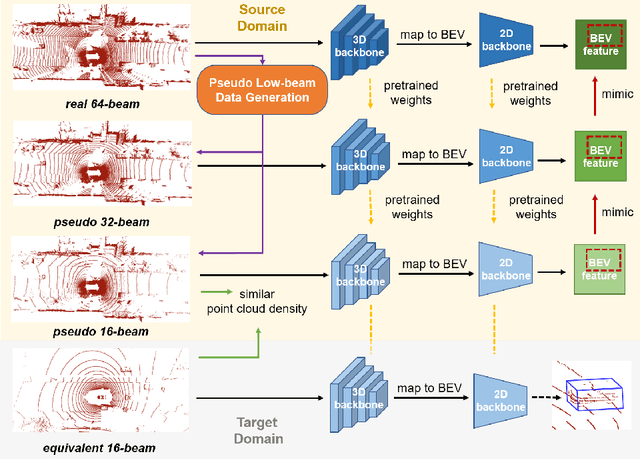
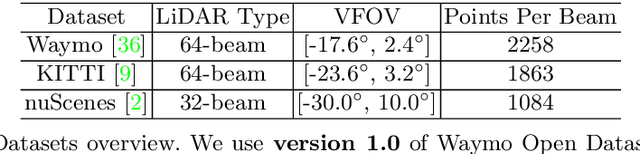
In this paper, we propose the LiDAR Distillation to bridge the domain gap induced by different LiDAR beams for 3D object detection. In many real-world applications, the LiDAR points used by mass-produced robots and vehicles usually have fewer beams than that in large-scale public datasets. Moreover, as the LiDARs are upgraded to other product models with different beam amount, it becomes challenging to utilize the labeled data captured by previous versions' high-resolution sensors. Despite the recent progress on domain adaptive 3D detection, most methods struggle to eliminate the beam-induced domain gap. We find that it is essential to align the point cloud density of the source domain with that of the target domain during the training process. Inspired by this discovery, we propose a progressive framework to mitigate the beam-induced domain shift. In each iteration, we first generate low-beam pseudo LiDAR by downsampling the high-beam point clouds. Then the teacher-student framework is employed to distill rich information from the data with more beams. Extensive experiments on Waymo, nuScenes and KITTI datasets with three different LiDAR-based detectors demonstrate the effectiveness of our LiDAR Distillation. Notably, our approach does not increase any additional computation cost for inference.